UART总线伺服舵机45KG系列

型号定义

| 外观 | 马达类型 | 尺寸 | 通讯协议 | 电压 | 位置传感器 |
|---|---|---|---|---|---|
| R: 双轴 | X: 无刷 | 6: 31.5×21×27.6mm | U: UART/TTL | [-]: 7.4V | [-]: 电位器 |
| H: 单轴 | P: 空心杯 | 8: 40×20×40mm | S: 分布式串行总线 | H: 12V | M: 绝对值位置编码器(磁编码) |
| A/L: 铁芯 | 18: 63×34×47mm | R: RS-485 | W: 24V | ||
| A: PWM(舵机参数可调) | |||||
| C: CAN | |||||
| P: PWM |
订购型号
- RP8-U45-M|HP8-U45-M
产品参数
基本参数
| 参 数 | 规 格 |
|---|---|
| 工作电压 | 6.0-8.4v |
| 马达类型 | 空心杯马达 |
| 位置传感器 | 12bit 非接触式绝对值编码器(磁编码) |
| 有效角度(行程范围) | ±180°(单圈角度)| ±368,640° (多圈角度) |
| 分辨率 | 4096 阶/360°(0.088°) |
| 处理器 | 32bit MCU |
| 通信类型 | UART/TTL 半双工 |
| 波特率 | 9,600bps~1Mbps |
| ID 范围 | 0~254 |
| 减速比 | 273:1 |
| 输出齿规格 | 不锈钢 / Ø6mm / 25T |
| 齿轮材料 | 全金属不锈钢组合 |
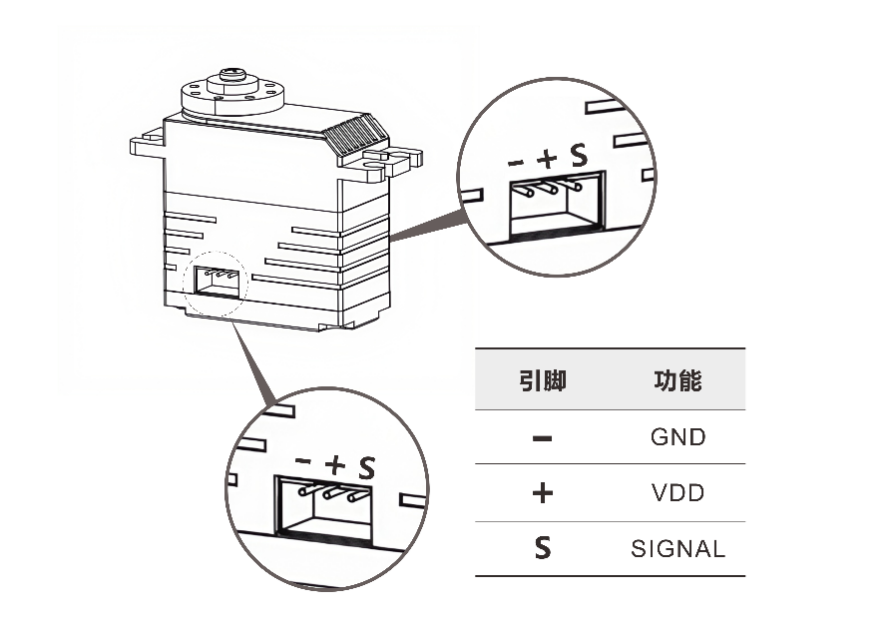
| 接口类型 | PH2.0-3Pin |
| 外壳材料 | 铝合金中段/上下壳工程塑胶 |
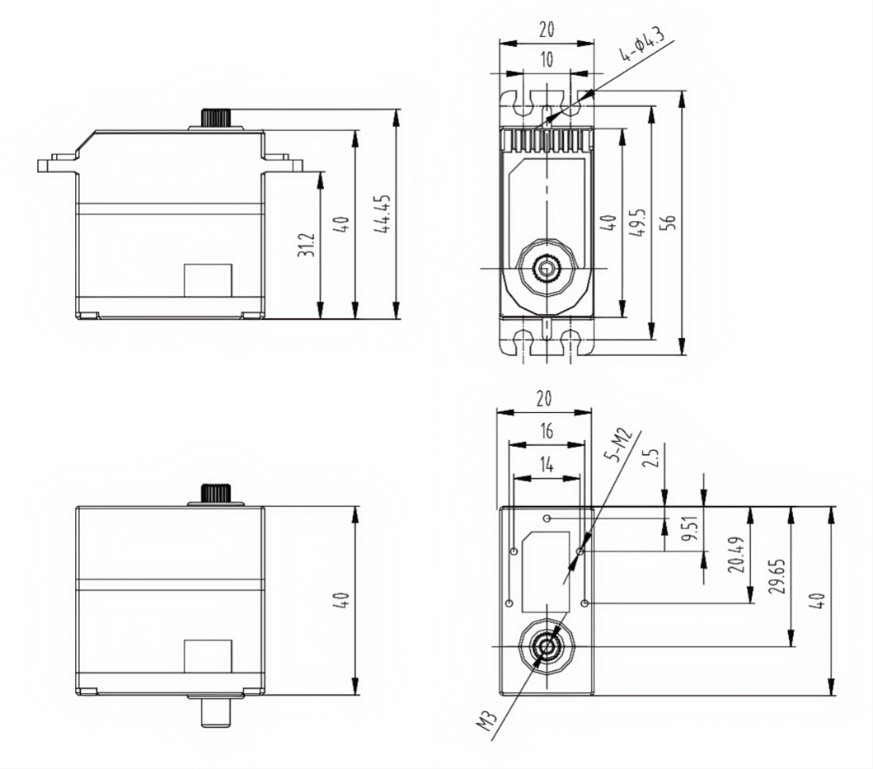
| 尺寸 | 40×20×40mm |
| 重量 | 73g |
| 工作温度 | -10~60℃ |
| 工作模式 | 单圈角度|多圈角度|阻尼模式 |
特性参数
| 参数 | 规格(7.4v) |
|---|---|
| 最大静态扭矩(堵转) | 4.41N·m (45kg-cm) |
| 最大动态扭矩 | 1.67N·m (17kg-cm) |
| 额定扭矩 | 0.54N·m (5.5kg-cm) |
| 额定转速 | 64rpm(0.156sec@60°) |
| 空载转速 | 90rpm(0.110sec@60°) |
| 空载电流 | <300mA |
| 待机电流 | <30mA |
| 峰值电流 | 6A |
| 轴向负载 | 20N |
| 径向负载 | 40N |
特性曲线

过载曲线

图纸及安装说明
尺寸图
接口定义
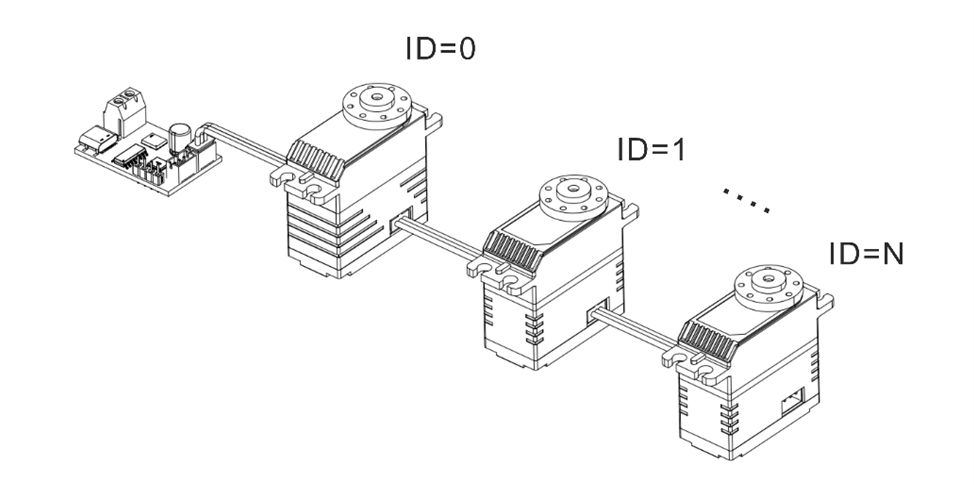
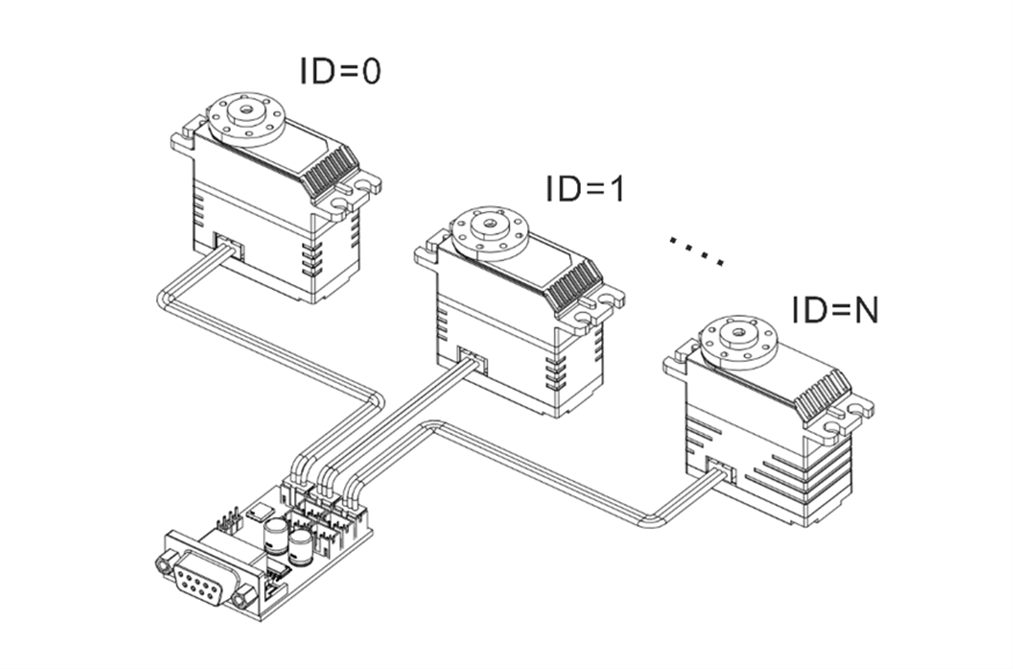
连线说明
串联
并联
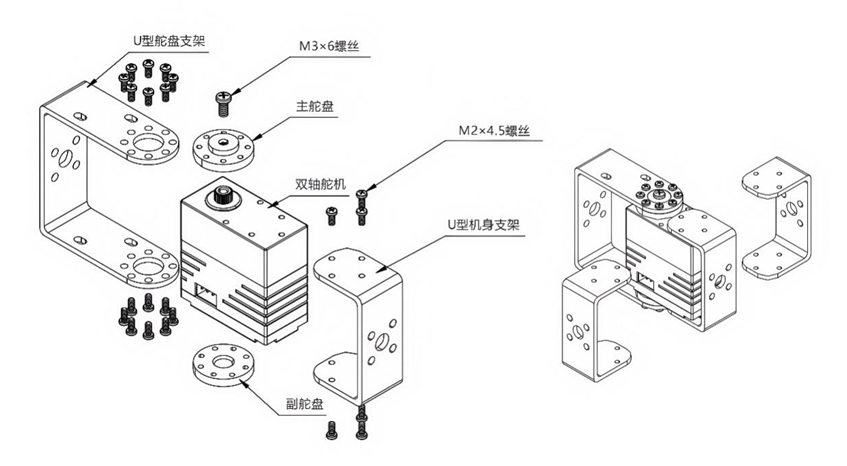
安装说明
- 单轴
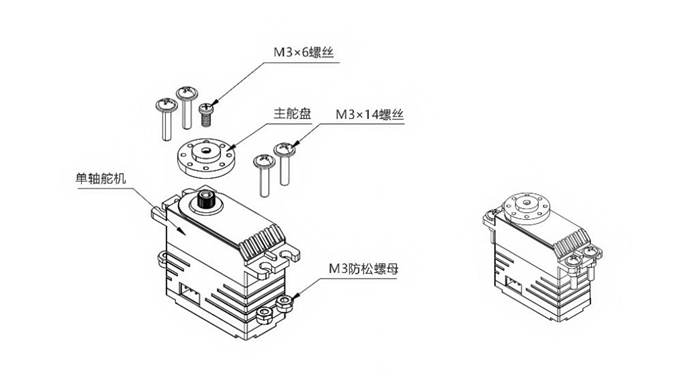
- 双轴