产品规格书 - HX8-U51H-M / RX8-U51H-M

HX8-U51H-M

RX8-U51H-M
1. 产品特点
- 采用无刷马达 / 不锈钢齿轮组设计
- UART 双向通信,最高波特率 1 Mbps,支持位置与状态回读
- 12-bit 绝对值位置编码器(4,096 阶分辨率),可任意设定原点
- 最大控制范围 ±368,640°(1,024 圈),具备断电角度记忆功能
- 内置梯形加减速算法,实现平滑运动控制
- 提供三种停止模式:锁力保持 / 失锁释放 / 阻尼控制
- 集成温度、电压、堵转、功率、电流多重保护机制,具备智能功率限制功能
- 配套可视化上位机调试软件,支持固件升级
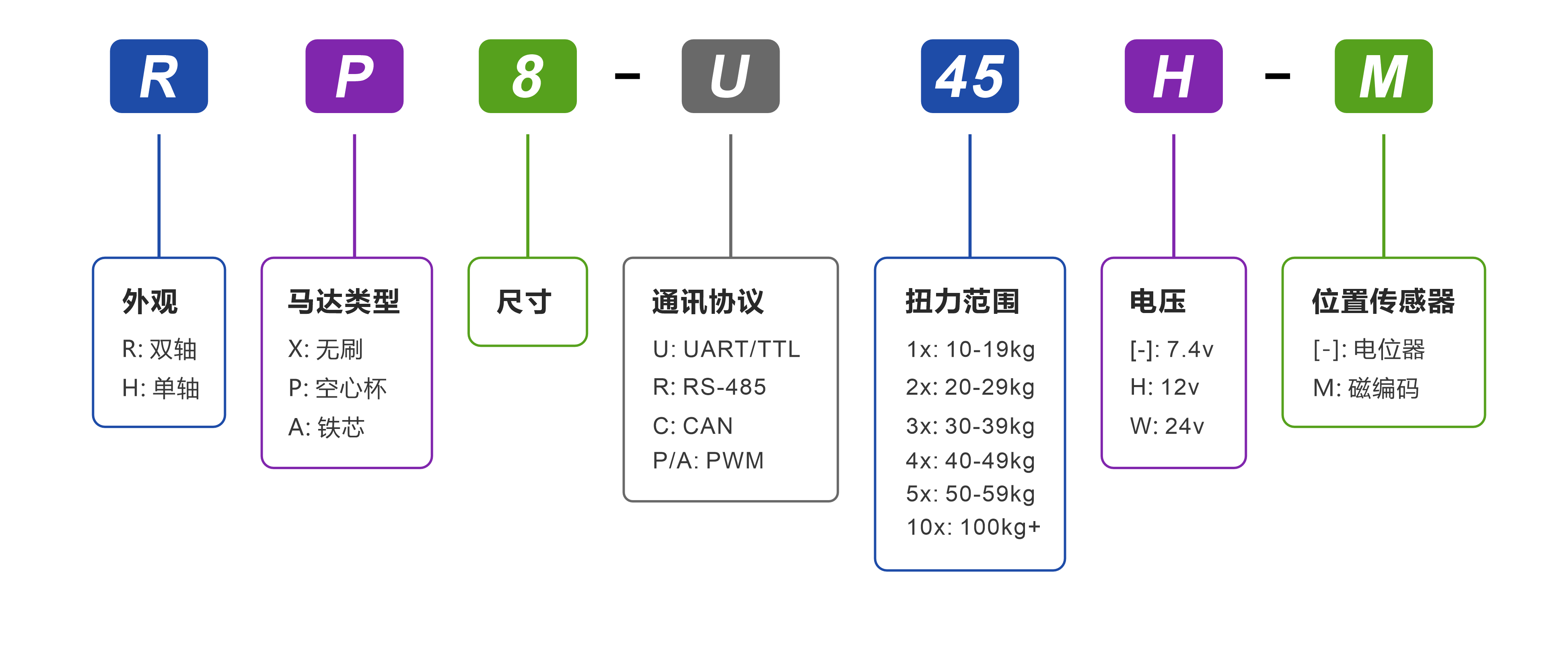
2. 型号定义
3. 规格参数
3.1. 基础参数
| 参数项 | 参数值 |
|---|---|
| 工作电压 | 9.0~12.6 V |
| 马达类型 | 无刷马达 |
| 位置传感器 | 12-bit 非接触式绝对值编码器(磁编码) |
| 分辨率 | 4096 阶 / 360°(0.088°) |
| 有效角度 | ±180°(单圈)/±368,640°(多圈) |
| 处理器 | 32-bit MCU |
| 通信类型 | UART / TTL 半双工 |
| 波特率 | 9,600 bps ~ 1 Mbps |
| ID 范围 | 0 ~ 254 |
| 减速比 | 387:1 |
| 齿轮材料 | 全金属不锈钢组合 |
| 输出轴规格 | 不锈钢 / Ø6 mm / D 型 |
| 外壳材料 | 全铝合金 |
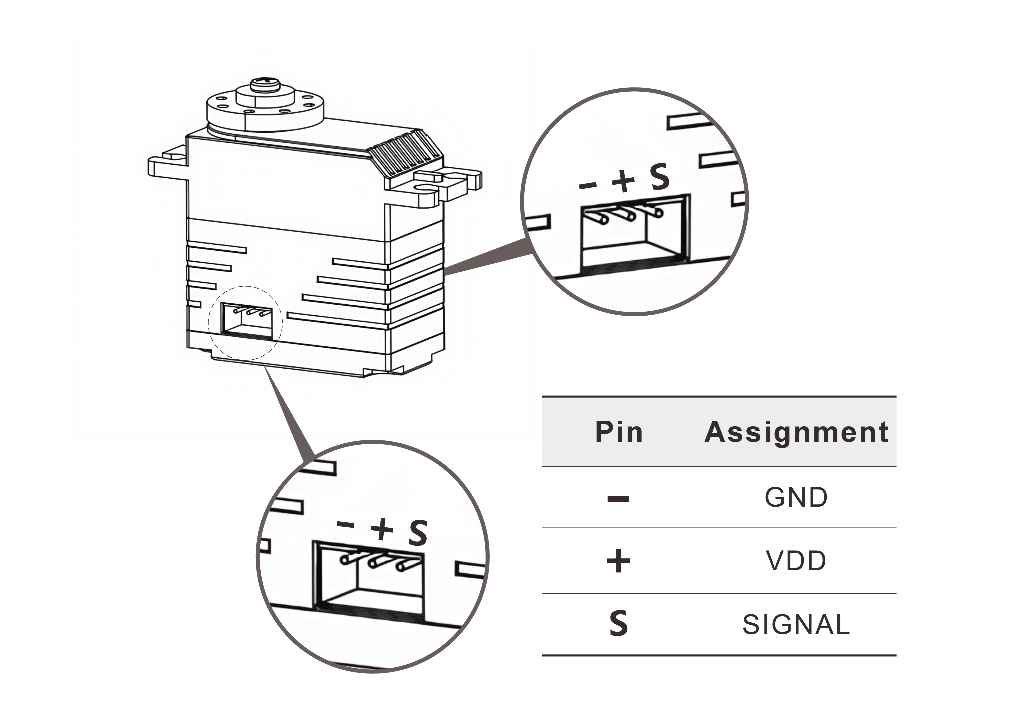
| 接口类型 | PH2.0 – 3Pin |
| 尺寸重量 | 40 × 20 × 40 mm / 83 g |
| 工作温度 | -10~60 ℃ |
| 工作模式 | 单圈角度 | 多圈角度 | 阻尼模式 |
3.2. 特性参数(@12V)
| 参数项 | 参数值 |
|---|---|
| 静态堵转扭矩 | 4.90 N·m(50 kg·cm) |
| 最大动态扭矩 | 2.26 N·m(23 kg·cm) |
| 额定扭矩 | 0.88 N·m(9 kg·cm) |
| 空载转速 | 66 rpm(0.151 s / 60°) |
| 额定转速 | 52 rpm(0.192 s / 60°) |
| 峰值电流 | 5.5 A |
| 空载电流 | <300 mA |
| 待机电流 | <40 mA |
| 轴向 | 20 N |
| 径向 | 40 N |

T-N 特性曲线

机械过载曲线
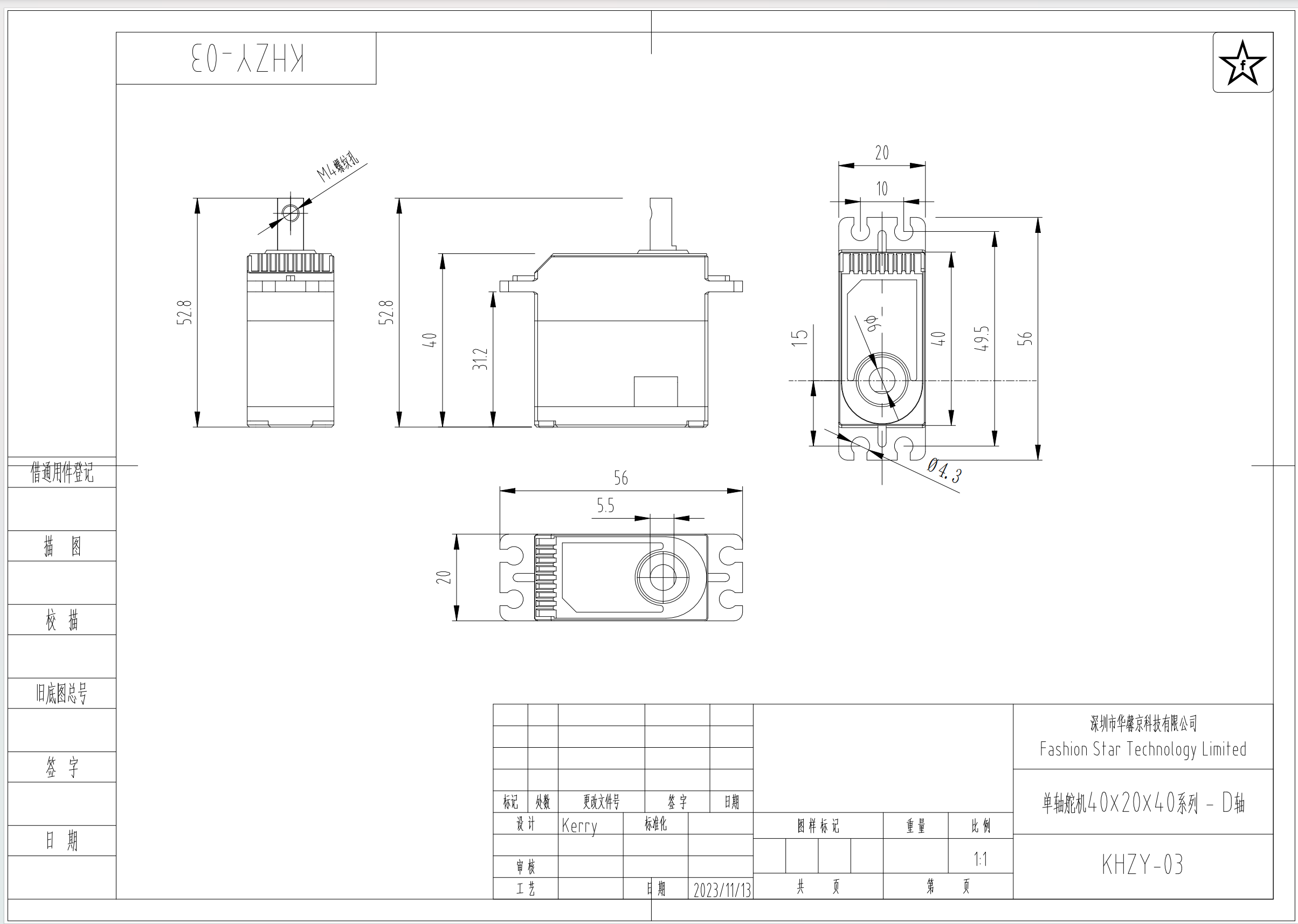
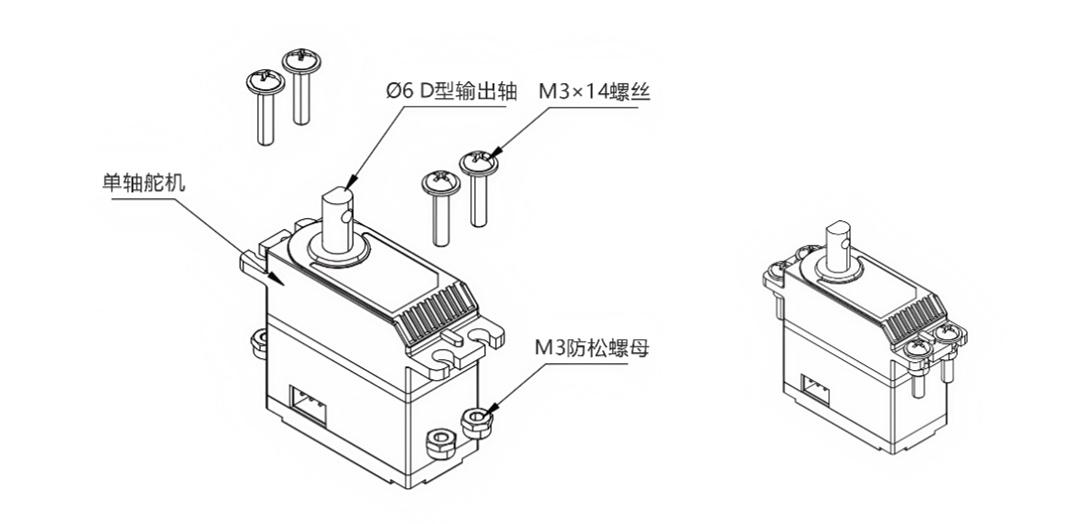
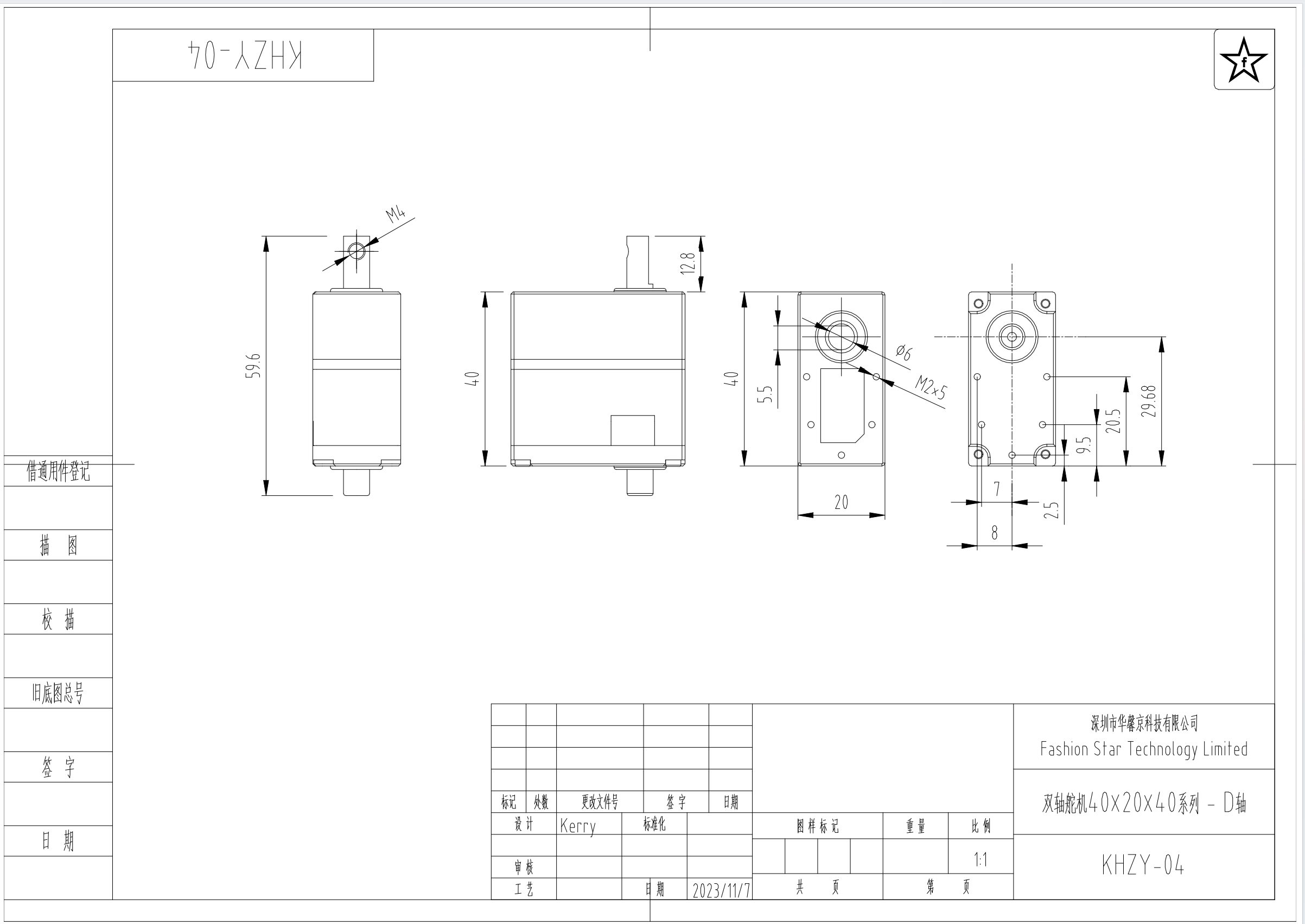
4. 外观尺寸与安装
4.1. 单轴舵机
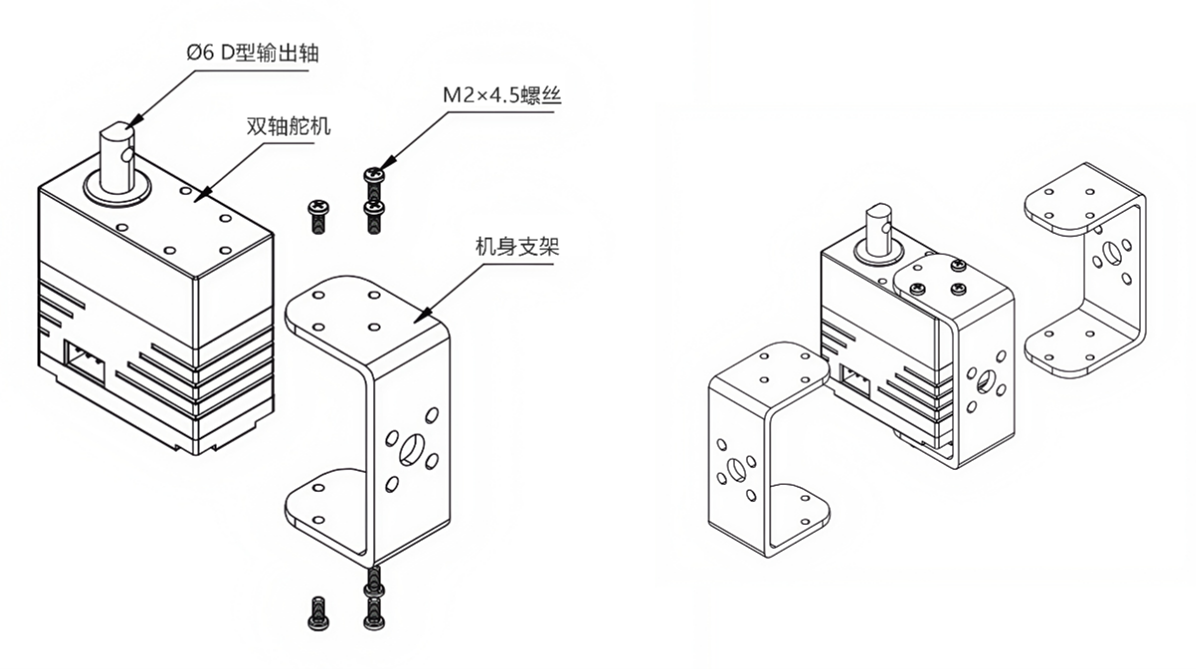
4.2. 双轴舵机
5. 接口与连线
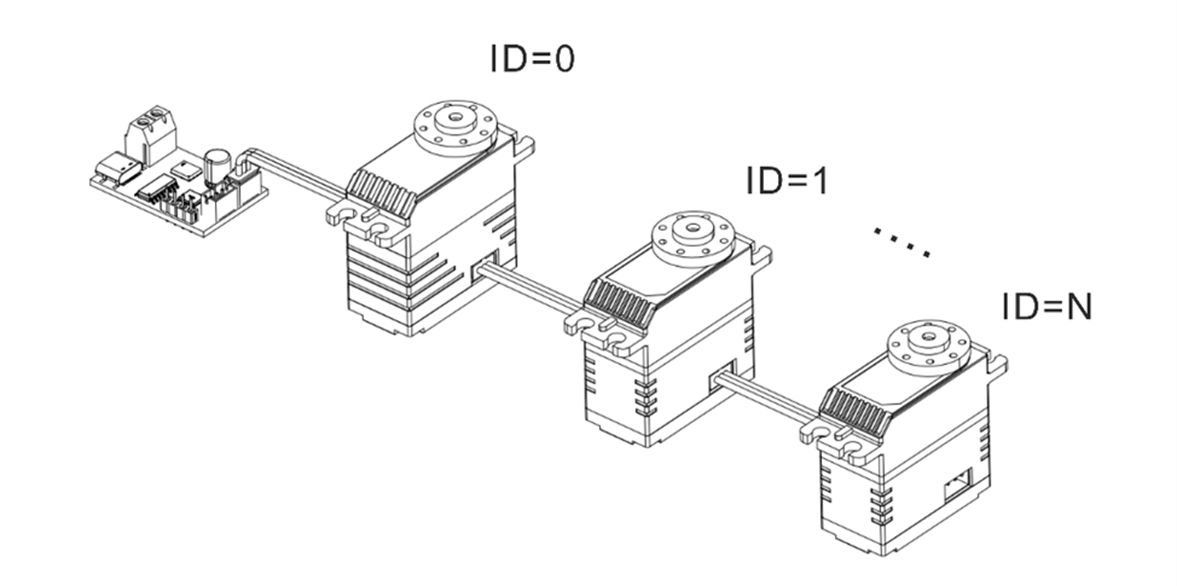
串联
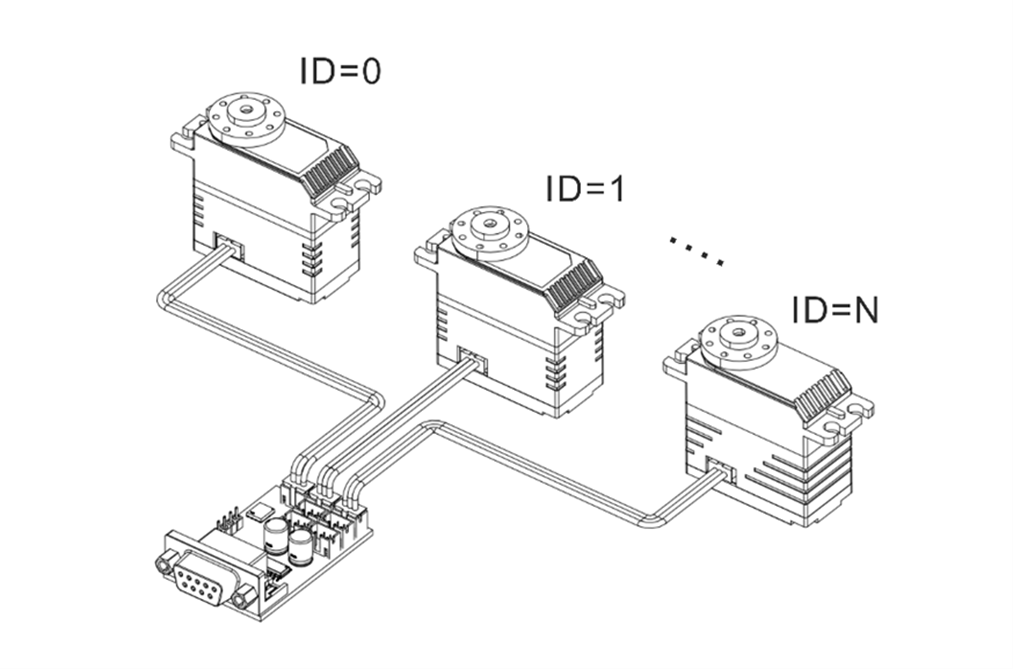
并联
6. 开发环境与SDK
提供覆盖主流控制板、语言与机器人框架的 SDK/示例工程,支持快速验证、功能开发与系统集成。
| 平台/环境/语言 | 兼容型号/内容 |
|---|---|
| Arduino | |
| ESP32 | |
| STM32 | |
| 树莓派 | |
| 编程语言 | |
| 操作系统 |
7. 保护功能
| 温度保护 |
|---|
|
| 堵转保护 |
|---|
|
| 功率保护 |
|---|
|
| 电压保护 |
|---|
|
| 电流保护 |
|---|
|
Warning
- 电压保护触发后,必须断电并重新上电,舵机才会恢复工作。
- 堵转/功率/电流保护用于避免过载损坏,阈值设置过高可能导致保护失效。
- 若频繁触发温度/电流保护,请降低负载或改善散热与供电。
Note
- 温度保护的默认阈值为 70℃。
- 电压保护的默认保护区间:
- 7.4V 版本:6.0V - 8.4V
- 12V 版本:9.0V - 12.6V
- 24V 版本:20.0V - 25.2V
- 电流保护可与堵转/功率保护结合使用,当上位机未触发前两项逻辑时,电流保护作为硬件层级的最后保障。
8. 指令与协议
8.1 控制指令
| 指令名称 | 指令编号 | 响应封包类型 |
|---|---|---|
| 通讯检测 | 01 (0x01) | 固定 |
| 简易单圈角度控制 | 08 (0x08) | 可配置 |
| 高级单圈角度控制 (基于时间) | 11 (0x0b) | 可配置 |
| 高级单圈角度控制 (基于速度) | 12 (0x0c) | 可配置 |
| 当前单圈角度读取 | 10 (0x0a) | 固定 |
| 简易多圈角度控制 | 13 (0x0d) | 可配置 |
| 高级多圈角度控制 (基于时间) | 14 (0x0e) | 可配置 |
| 高级多圈角度控制 (基于速度) | 15 (0x0f) | 可配置 |
| 当前多圈角度读取 | 16 (0x10) | 固定 |
| 重置圈数 | 17 (0x11) | 可配置 |
| 阻尼控制 | 09 (0x09) | 可配置 |
| 停止指令 | 24 (0x18) | 可配置 |
| 同步指令 | 25 (0x19) | 无 |
| 异步写入指令 | 18 (0x12) | 无 |
| 异步执行指令 | 19 (0x13) | 无 |
| 数据读取 | 03 (0x03) | 固定 |
| 数据监控 | 22 (0x16) | 固定 |
| 设置原点 | 23 (0x17) | 可配置 |
| 自定义配置参数 | 04 (0x04) | 可配置 |
8.2 协议格式
- 发送协议格式
| 字节位 | 0~1 | 2 | 3 | 4~N+3 | N+4 |
|---|---|---|---|---|---|
| 内容 | 请求头标识 0x12 0x4c |
指令编号 | 内容长度N | 数据内容 | 校验和 |
示例:ID2 舵机以最大功率,500ms 时间旋转到 90 度的位置

- 响应协议格式
| 字节位 | 0~1 | 2 | 3 | 4~N+3 | N+4 |
|---|---|---|---|---|---|
| 内容 | 响应头标识 0x05 0x1c |
指令编号 | 内容长度N | 数据内容 | 校验和 |
解包:0x86 0x03 是当前的舵机角度,解包后是 902,转换为角度制就是 90.2 度。

Tip
- 产品支持多种控制指令,不同指令长度可能存在差异。为避免因指令丢包导致控制异常,建议在指令发送完成后再增加至少 10ms 的间隔时间。 例如:指令1(发送完成)→ 延迟10ms → 指令2(发送完成)→ 延迟10ms → 指令3
- 在默认设置下,当前指令执行过程中,若伺服舵机收到新的控制指令,将立即中断当前指令并优先执行新指令。原指令将不再继续执行。
- 通过发送对应 ID 的 Ping 指令,根据回包情况判断该舵机是否在线。
9. 运动控制
9.1 单圈角度控制
支持按时间/速度两类控制,参数包含目标角度、运行功率、加减速等;并可通过单圈角度读取指令获取当前位置。
| 指令ID | 指令名称 | 参数 |
|---|---|---|
| 08 (0x08) | 简易单圈角度控制 | 目标角度、运动时间、运行功率 |
| 11 (0x0B) | 高级单圈角度控制(基于时间) | 目标角度、运动时间、加速时间、减速时间、运行功率 |
| 12 (0x0C) | 高级单圈角度控制(基于速度) | 目标角度、运动速度、加速时间、减速时间、运行功率 |
| 10 (0x0A) | 单圈角度读取 | 当前角度 |
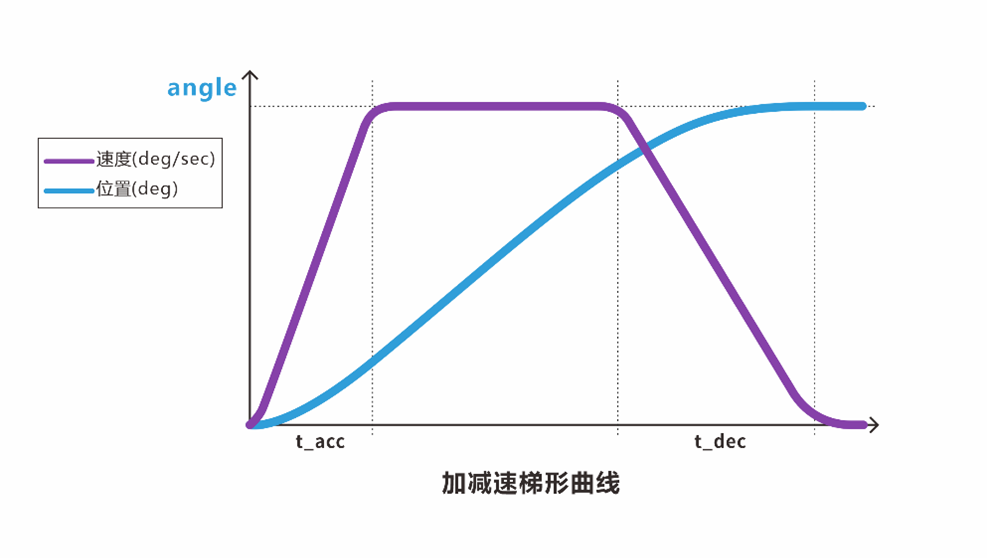
梯形加减速
Note
- 控制范围:单圈模式可控范围为 ±180°。
- 控制单位:角度单位为 °,最小控制精度 0.1°。
9.2 多圈角度控制
支持按时间/速度两类控制,参数包含目标角度、运行功率、加减速等;并可通过多圈角度读取指令获取当前位置。
| 指令ID | 指令名称 | 参数 |
|---|---|---|
| 13 (0x0D) | 简易多圈角度控制 | 目标角度、运动时间、运行功率 |
| 14 (0x0E) | 高级多圈角度控制(基于时间) | 目标角度、运动时间、加速时间、减速时间、运行功率 |
| 15 (0x0F) | 高级多圈角度控制(基于速度) | 目标角度、运动速度、加速时间、减速时间、运行功率 |
| 16 (0x10) | 多圈角度读取 | 当前角度 |
梯形加减速
Note
- 控制范围:多圈角度模式下,控制范围为 ±368,640°(±1,024圈)。
- 控制单位:角度单位为 °,最小控制精度 0.1°。
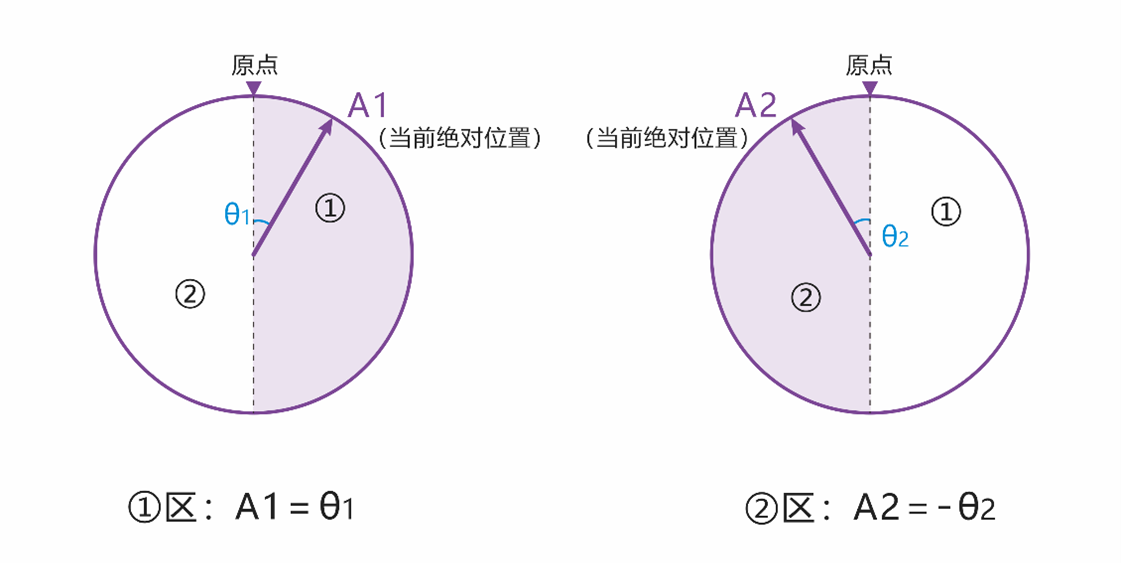
绝对角度重设
- 在舵机处于释放锁力状态时,可通过上位机或指定指令来重设当前角度数据。
- 重设后,舵机会以当前绝对位置来重设角度,再次设定后的角度初始值将在 -180° 至 +180° 范围内。
示例:如图所示,A1 点当前角度为 6,880°,重设后的角度为 θ1。A2 点当前角度为 6,800°,重设后的角度为 -θ2。
多圈重置
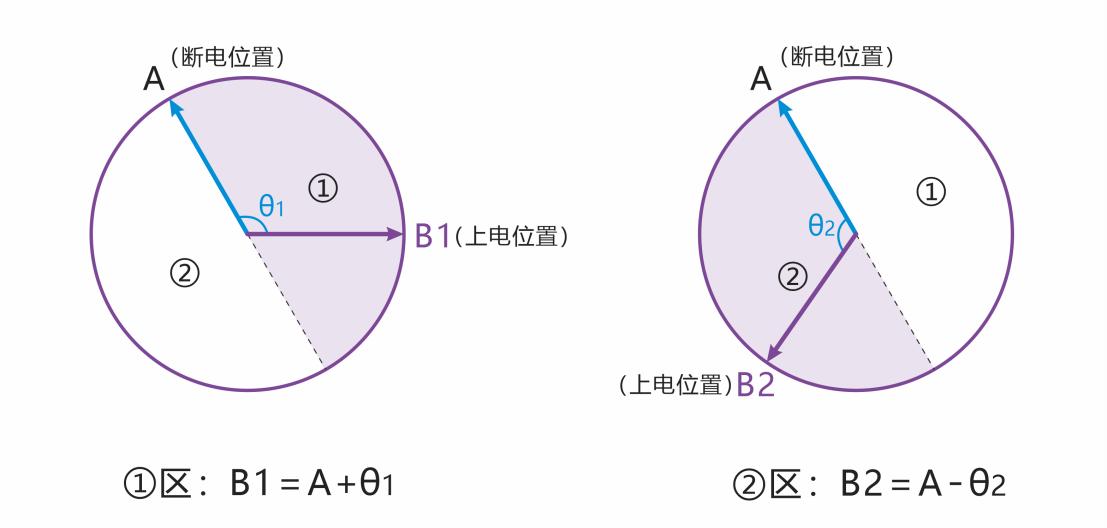
断电角度记忆
- 支持断电角度记忆功能。
- 断电后,若伺服舵机的角度未发生变化,则上电后读取的当前角度值保持不变。 例如:A 点为断电前的角度位置 6,800°,断电期间角度未改变,舵机仍停留在 A 点,则上电后读取的角度仍为 6,800°。
- 断电后,若由于外力作用导致舵机角度发生变化,则再次上电后读取到的角度值将落在记忆角度 ±180° 的范围内。 例如:如图所示,A 点为断电前的角度 6,800°。若断电期间舵机被外力转动,最终停在 B1 点,则上电后读取角度为 6,920°;若停在 B2 点,则读取角度为 6,680°。
掉电记忆
9.3 阻尼模式
- 允许伺服舵机在外部力的作用下调整到不同的角度位置,同时保持一定的阻尼效果。
- 阻尼系数可自定义。
9.4 停止指令
- 客户可以根据不同运动控制需要,选择合适的停止指令类型,具体类型详见下表。
- 停止指令也可被用于伺服舵机在堵转保护下,恢复正常工作状态使用。
- 当伺服舵机在失锁状态下,发送“保持锁力”指令,可使其从当前位置重建锁力。
| 停止指令类型 | 动作模式 |
|---|---|
| 失去锁力 | 舵机立即停止运动,并释放锁力。 |
| 保持锁力 | 舵机立即停止运动,并维持锁力,或在无锁力状态恢复锁力。 |
| 保持阻尼 | 舵机立即停止运动,并进入阻尼模式,外力可以调整角度。 |
9.5 同步指令
- 单条指令同时包含多个伺服舵机的控制指令,适用于多个舵机协同动作的场景。
- 每个伺服舵机通过唯一的 ID 与指令内容中的参数进行匹配,仅解析并响应与自身 ID 相关的控制信息。
- 所有伺服舵机接收完指令后,将同时开始执行各自的指令,实现同步动作效果。
9.6 异步指令
- 异步指令由异步写入指令和异步执行指令两部分组成。
- 异步写入指令发送后,再发送需要执行的运动指令,使该指令暂存在对应 ID 伺服舵机的寄存器中,该运动指令不会立即执行,需通过异步执行指令统一启动。
- 当异步执行指令下达时,所有已暂存运动指令的伺服舵机将同时执行对应动作,实现多个伺服舵机的同步控制效果。
- 已暂存的运动指令,在未重新写入或未断电的情况下将持续保留,不会因其他指令的运行而被覆盖或清除。
- 异步指令被触发执行后,相关参数将被自动清除,不再保留。