Product Datasheet - HA8-U25-M / RA8-U25-M

HA8-U25-M

RA8-U25-M
1. Product Features
- UART bidirectional communication, up to 1 Mbps, supports position and status feedback
- 12-bit absolute position encoder (4,096 counts resolution), supports arbitrary zero-point setting
- Max control range ±368,640° (±1,024 turns), with power-off position memory
- Built-in trapezoidal acceleration/deceleration for smooth motion control
- Provides three stop modes: torque holding / torque release / damping control
- Integrated protections for temperature, voltage, stall, power, and current, with intelligent power limiting
- Includes a visual Master / PC Software for configuration, supports firmware upgrade
1. Product Features
- Designed with brushless motor / stainless-steel gear set / all-metal housing
- UART bidirectional communication, up to 1 Mbps, supports position and status feedback
- 12-bit absolute position encoder (4,096 counts resolution), supports arbitrary zero-point setting
- Max control range ±368,640° (±1,024 turns), with power-off position memory
- Built-in trapezoidal acceleration/deceleration for smooth motion control
- Provides three stop modes: torque holding / torque release / damping control
- Integrated protections for temperature, voltage, stall, power, and current, with intelligent power limiting
- Includes a visual Master / PC Software for configuration, supports firmware upgrade
1. Product Features
- Designed with brushless motor / stainless-steel gear set
- UART bidirectional communication, up to 1 Mbps, supports position and status feedback
- 12-bit absolute position encoder (4,096 counts resolution), supports arbitrary zero-point setting
- Max control range ±368,640° (±1,024 turns), with power-off position memory
- Built-in trapezoidal acceleration/deceleration for smooth motion control
- Provides three stop modes: torque holding / torque release / damping control
- Integrated protections for temperature, voltage, stall, power, and current, with intelligent power limiting
- Includes a visual Master / PC Software for configuration, supports firmware upgrade
2. Model Naming

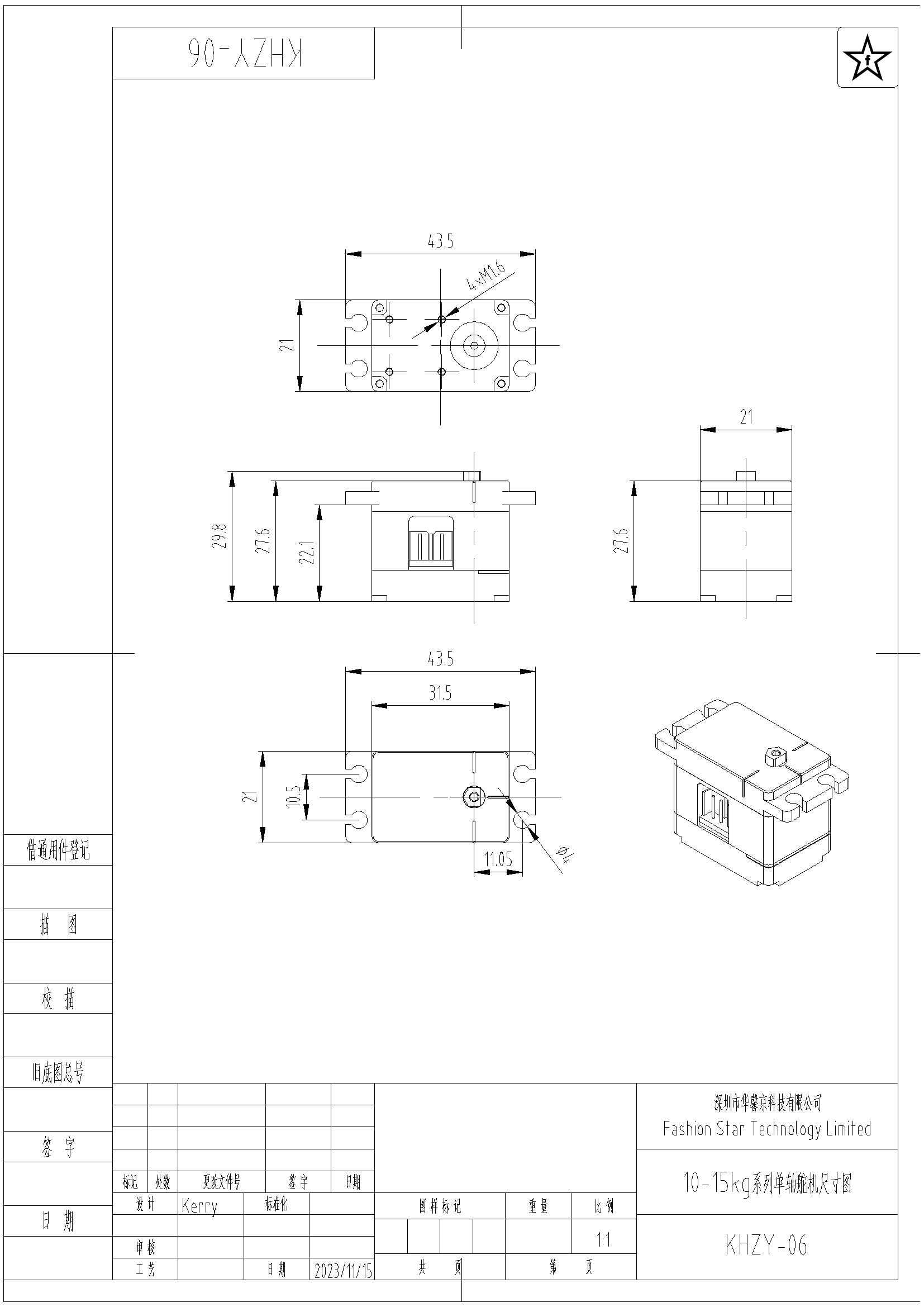
4. Dimensions & Installation
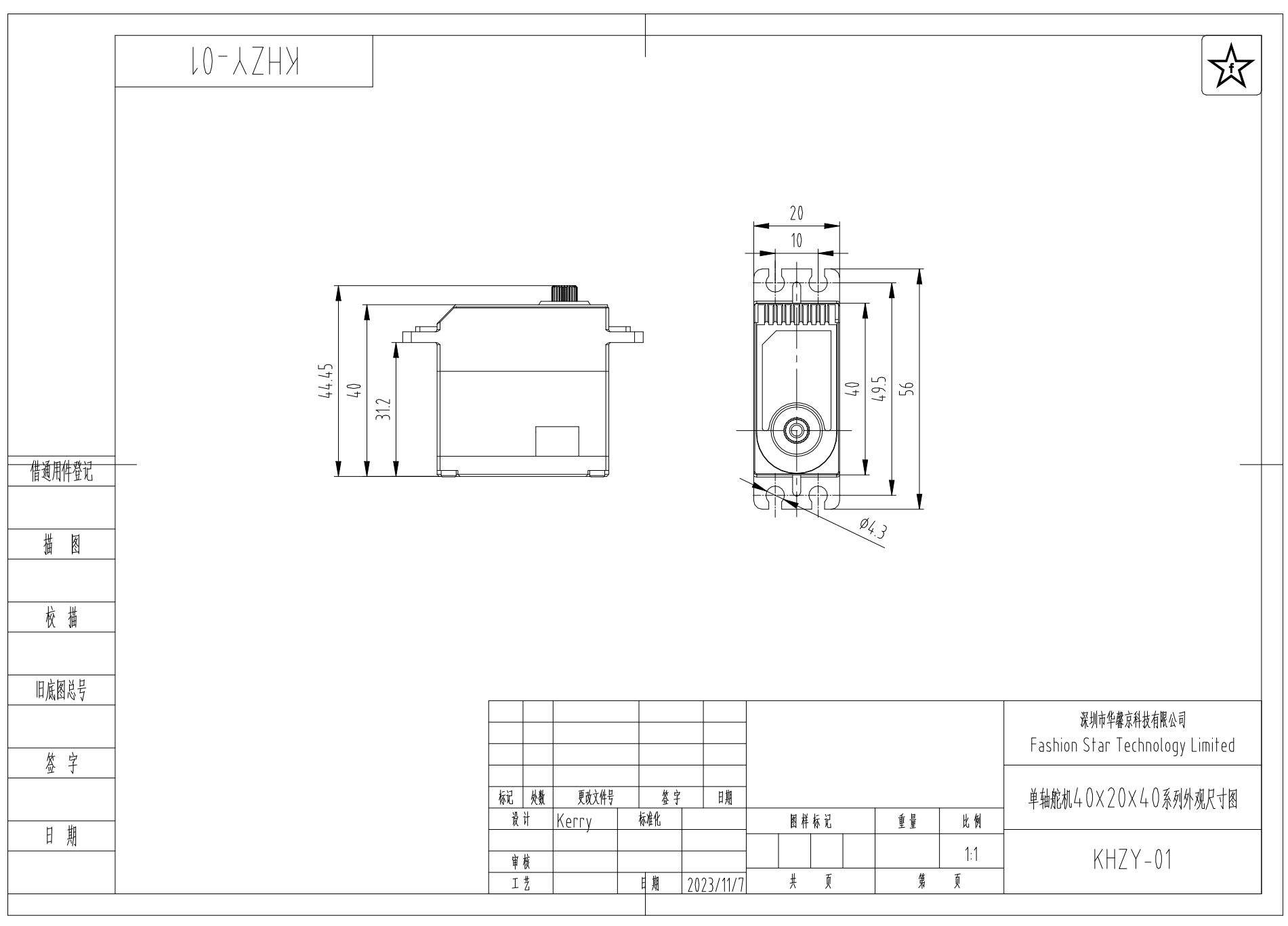
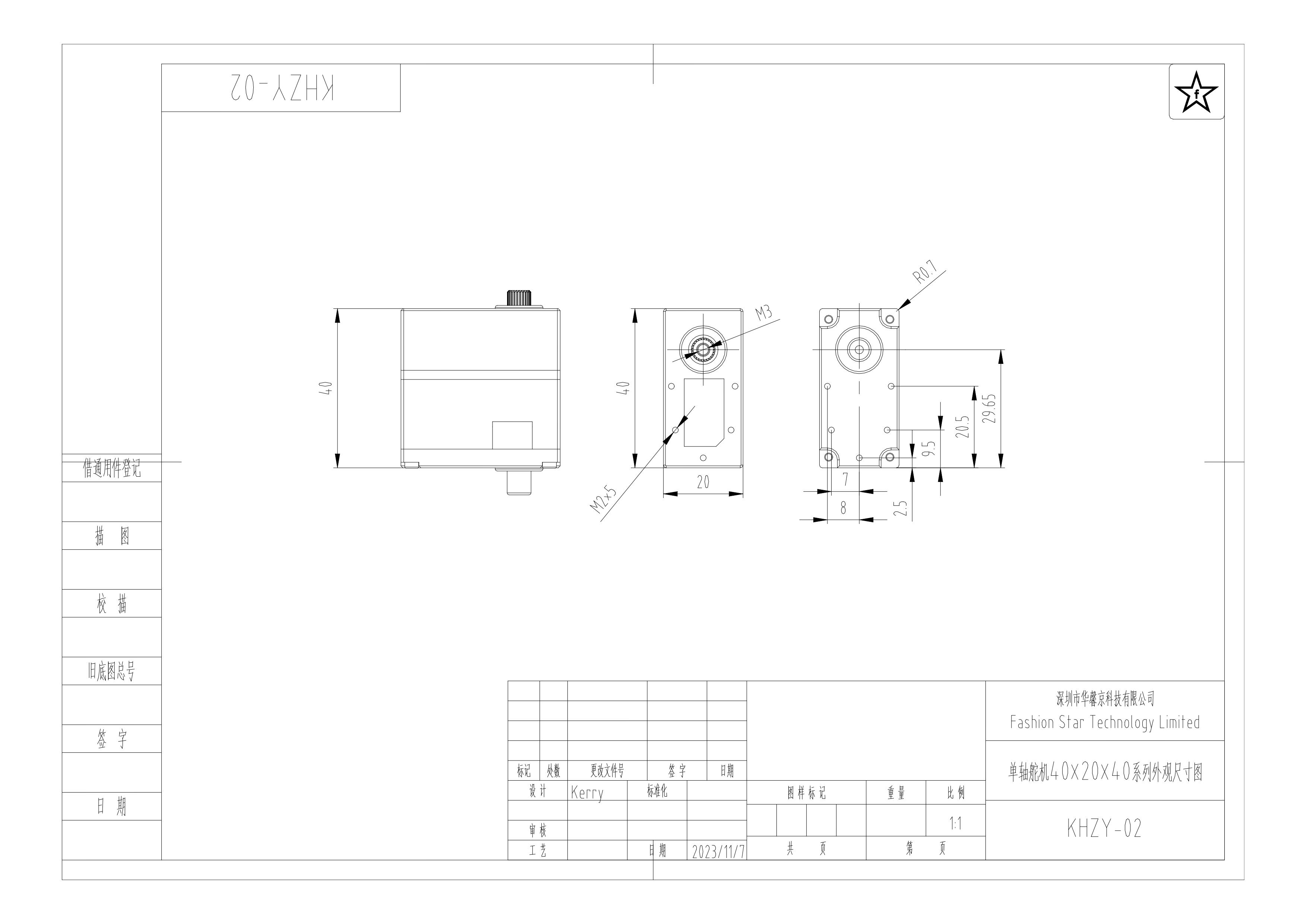
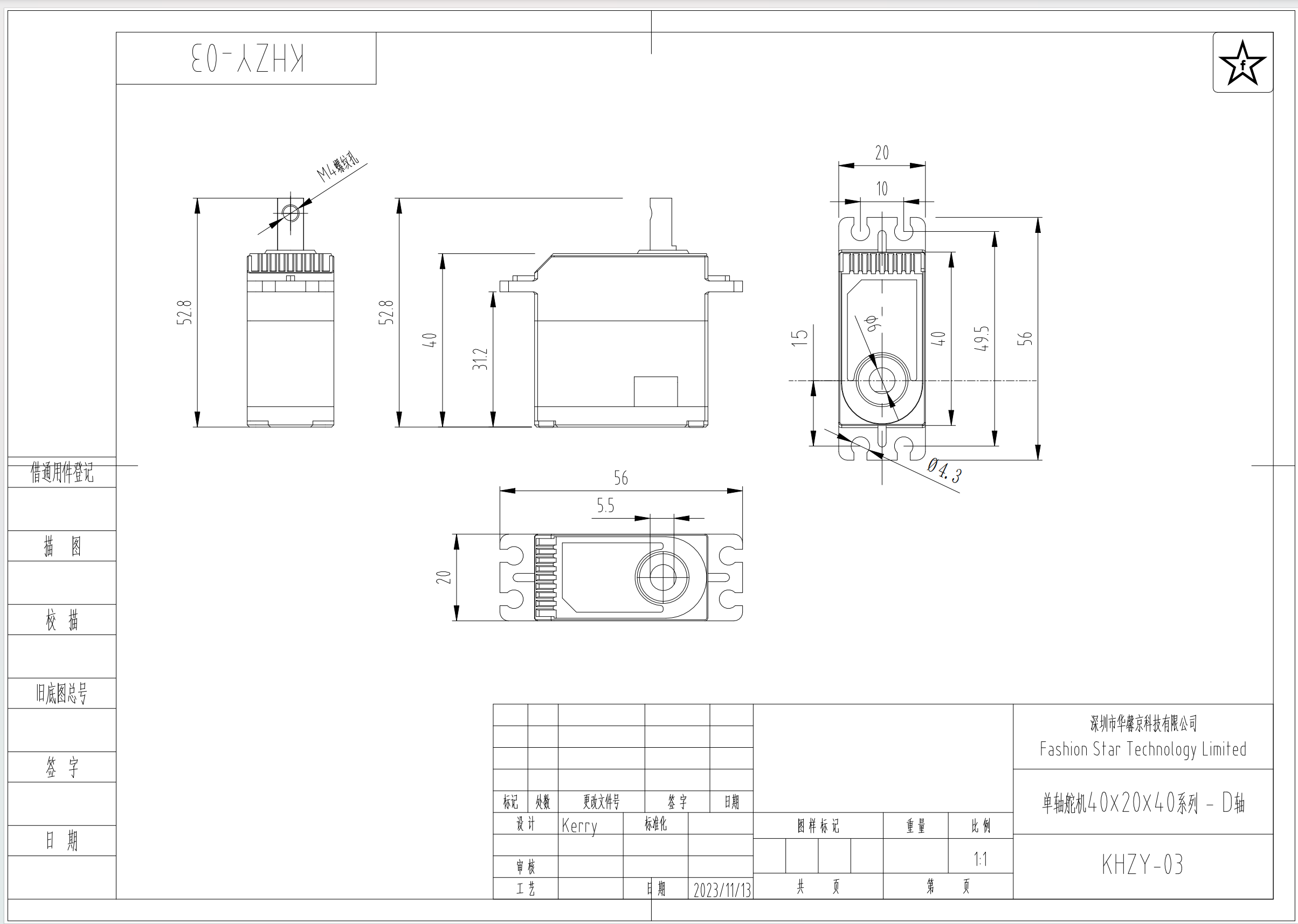
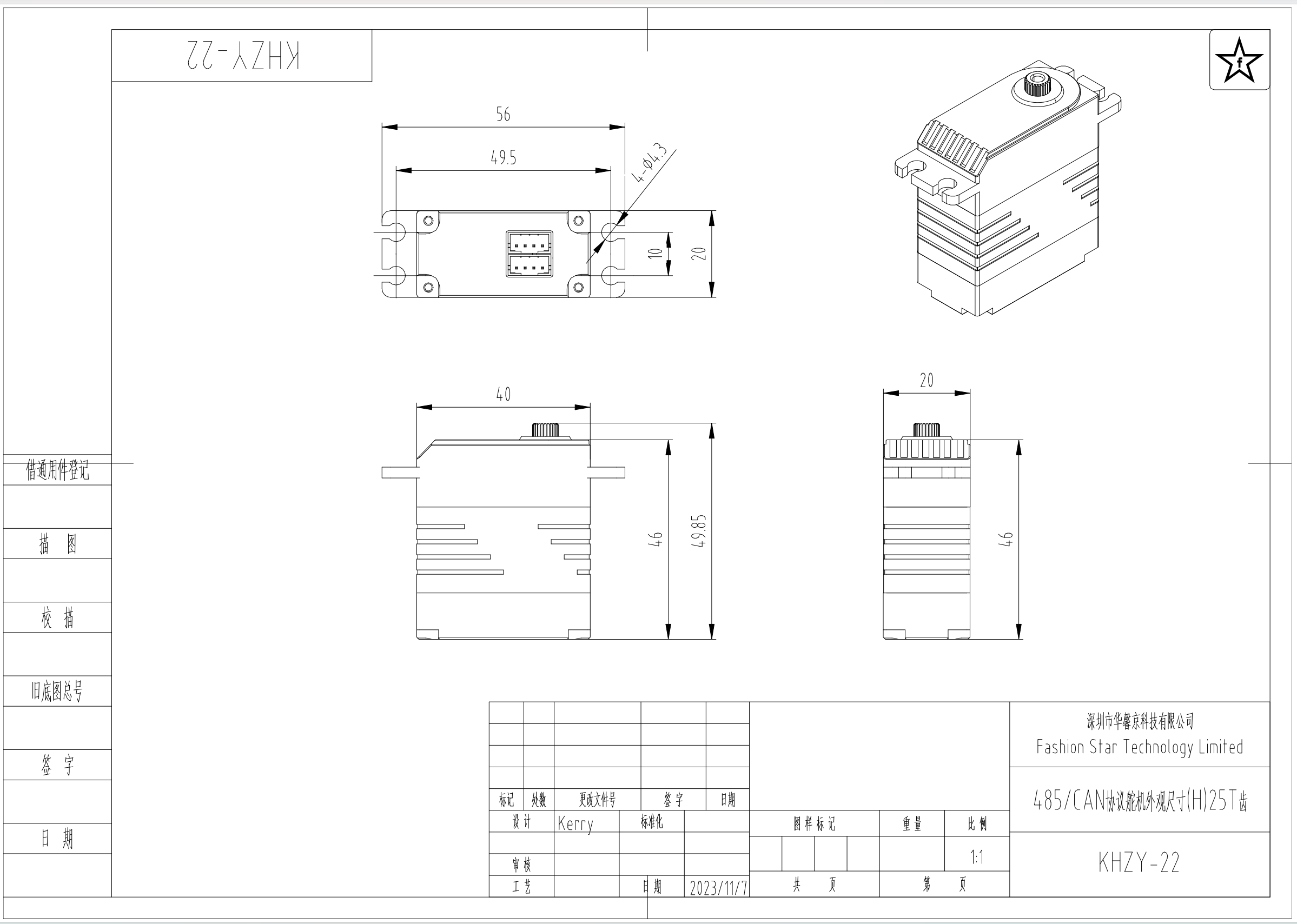
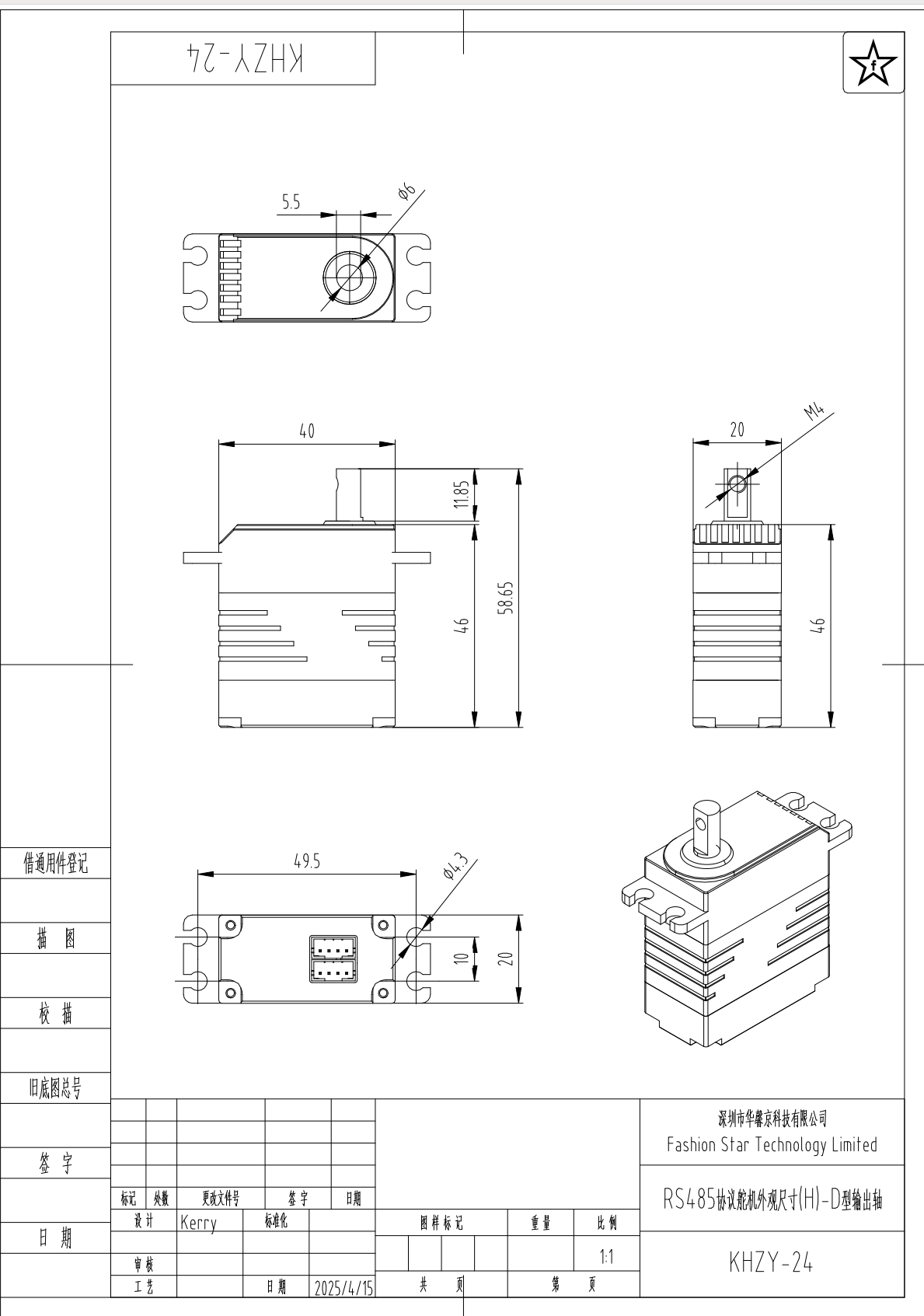
4.1. Single-shaft Servo

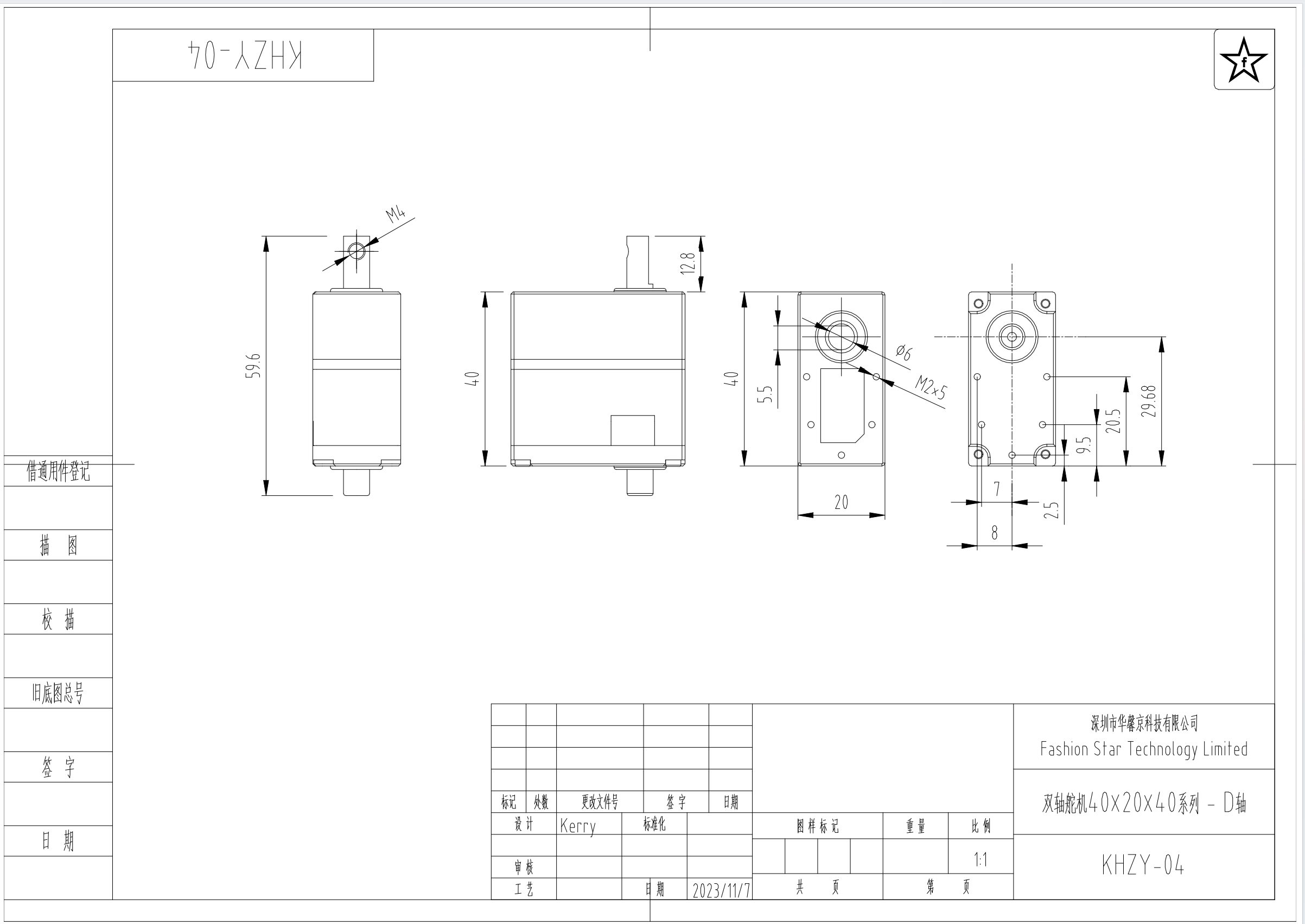
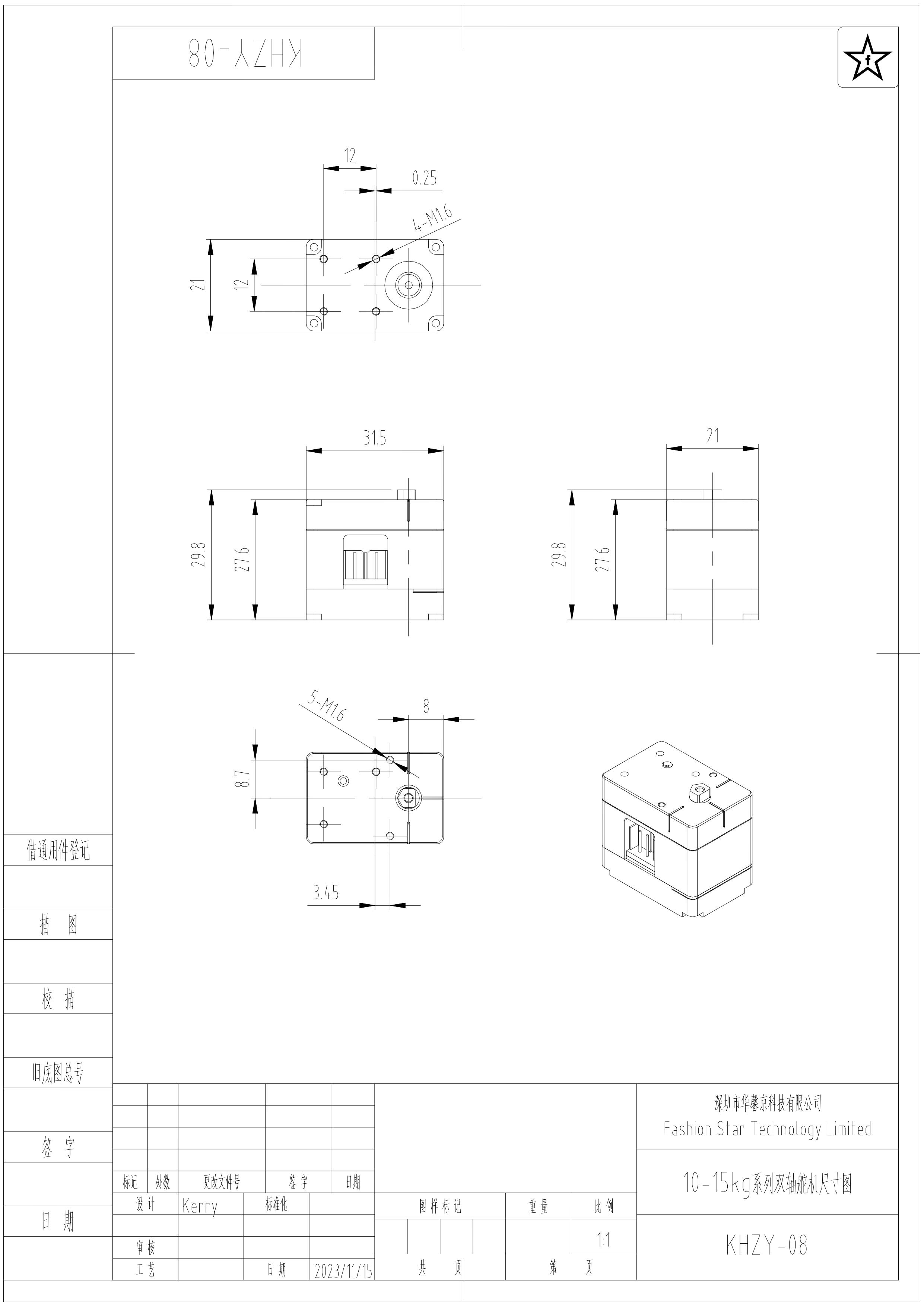
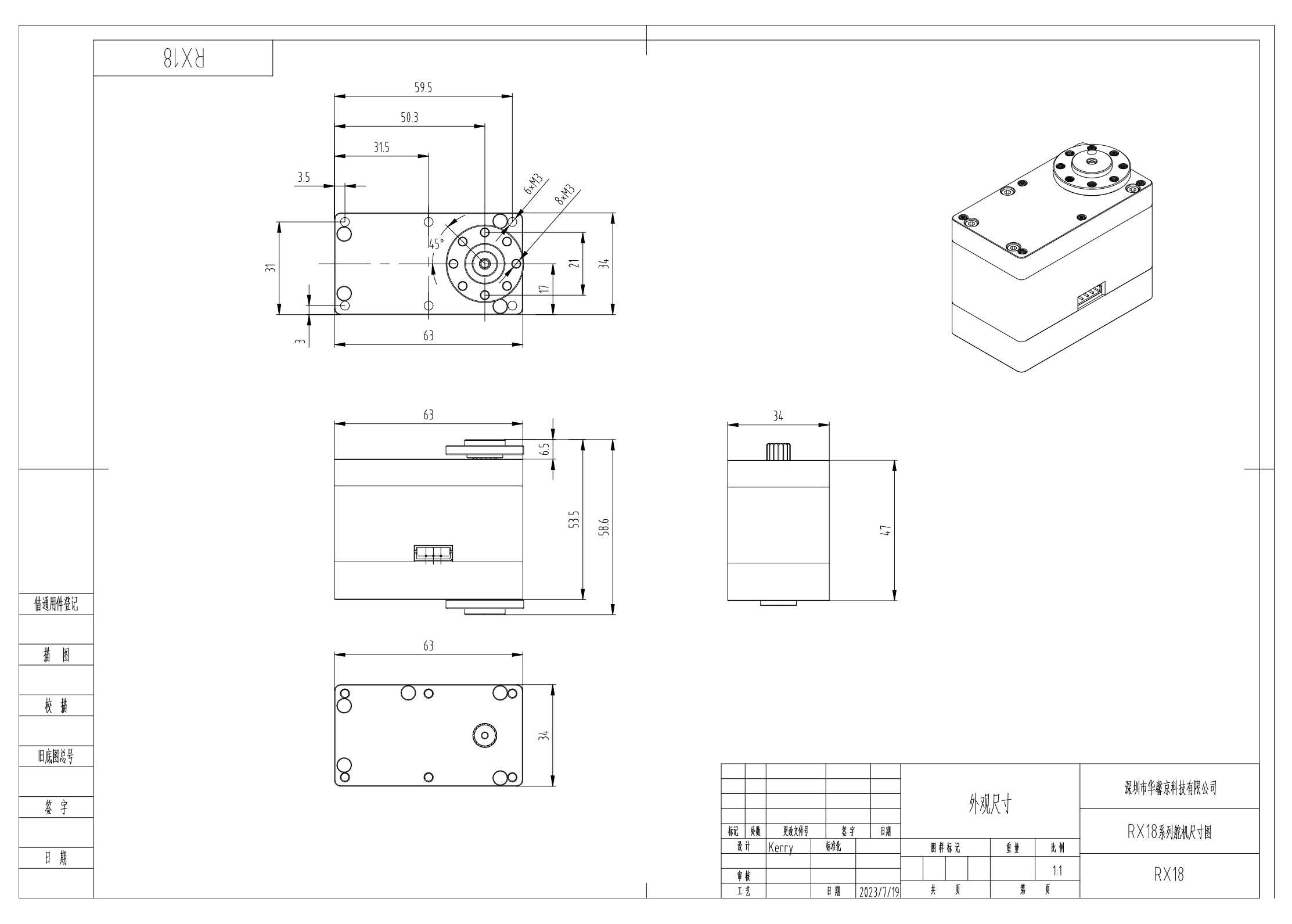
4.2. Dual-shaft Servo

4. Dimensions & Installation
4.1. Single-shaft Servo

4.2. Dual-shaft Servo

4. Dimensions & Installation
4.1. Single-shaft Servo

4.2. Dual-shaft Servo

4. Dimensions & Installation
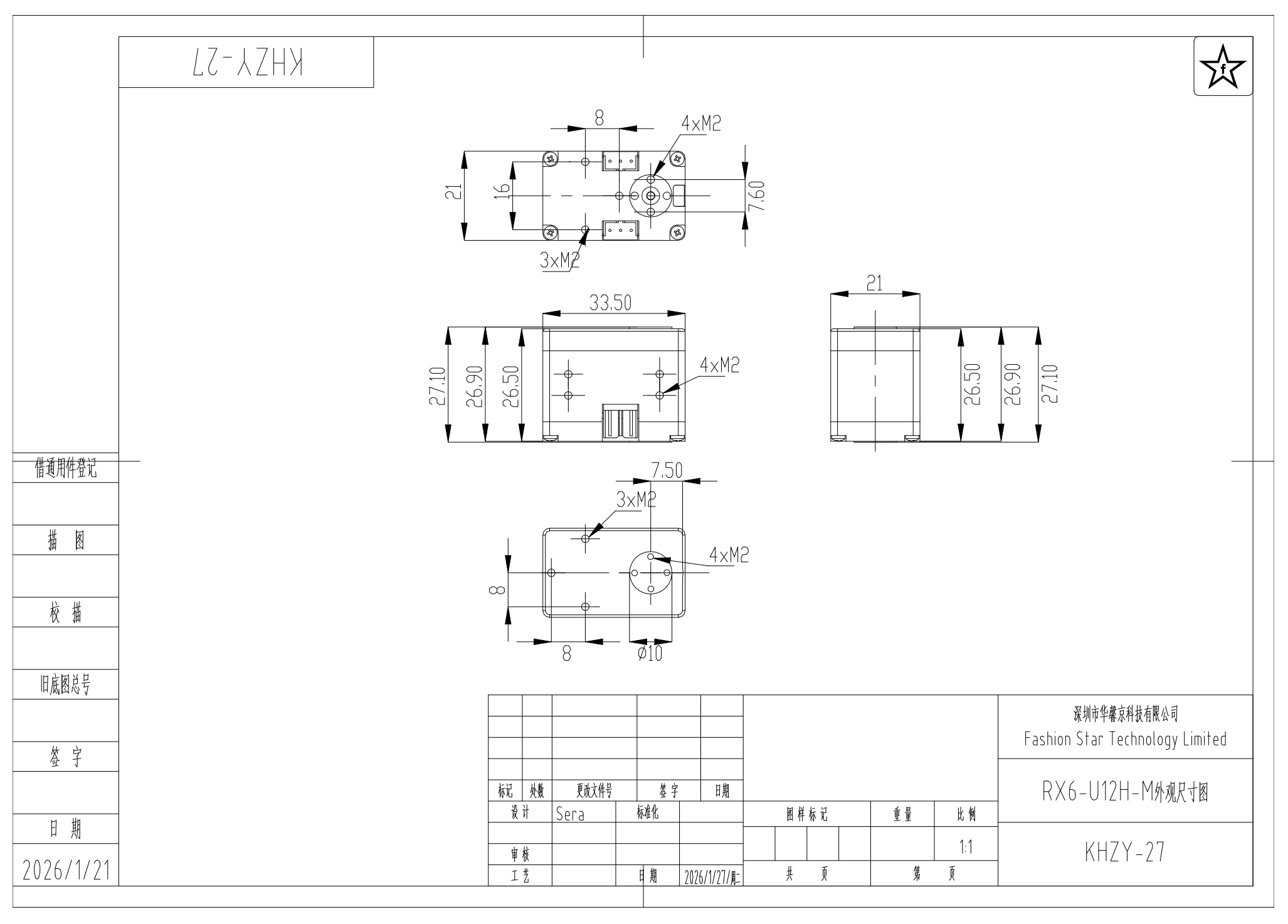
4.1. Dual-shaft Servo

4. Dimensions & Installation
4.1. Single-shaft Servo
本系列暂无单轴型号。
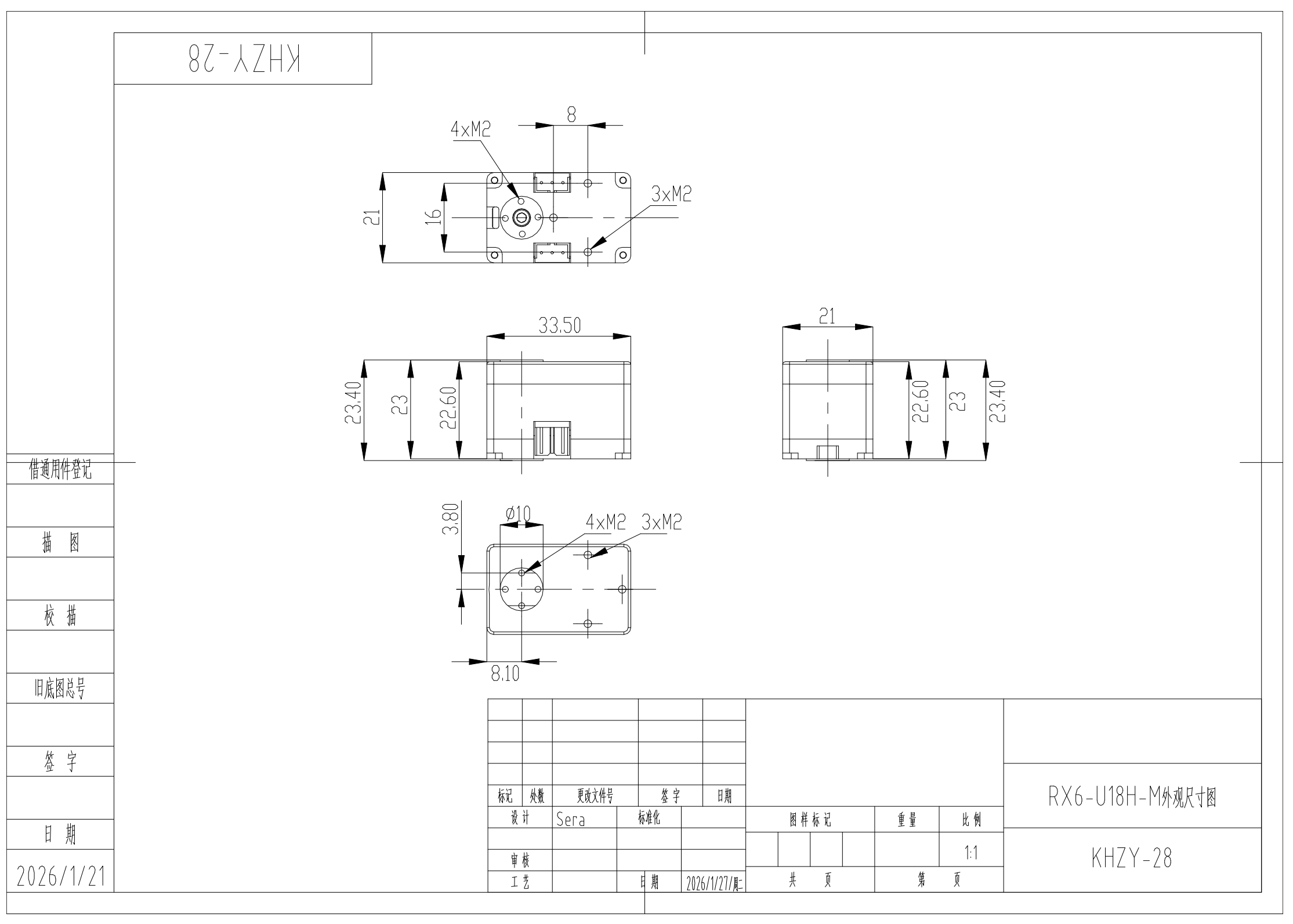
4.2. Dual-shaft Servo

4. Dimensions & Installation
4.1. Dual-shaft Servo

4. Dimensions & Installation
4.1. Single-shaft Servo

4. Dimensions & Installation
4.1. Single-shaft Servo

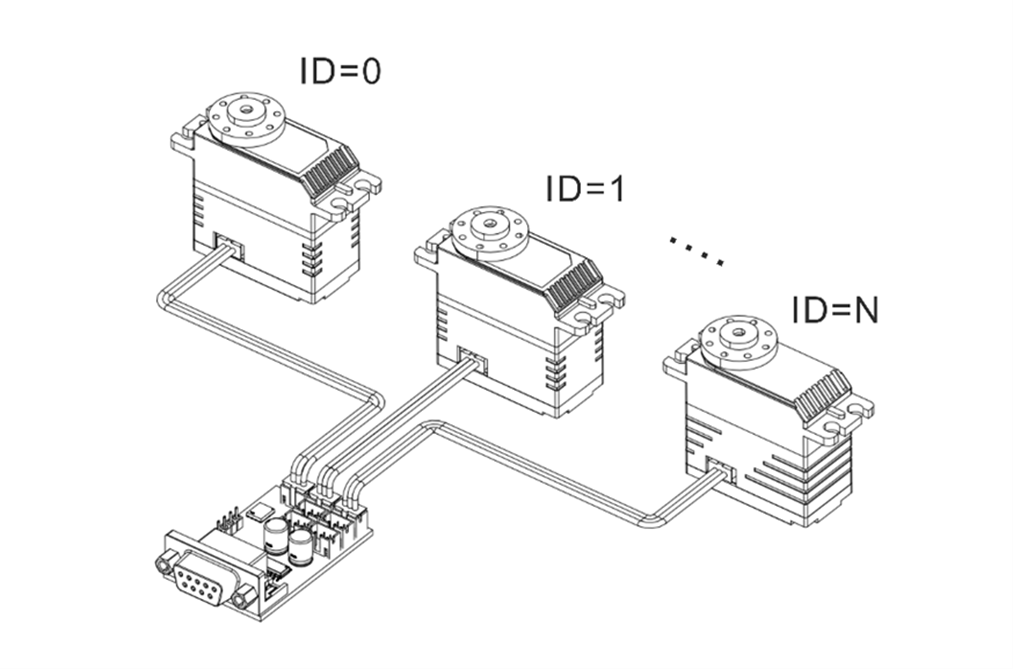
5. Interfaces & Wiring

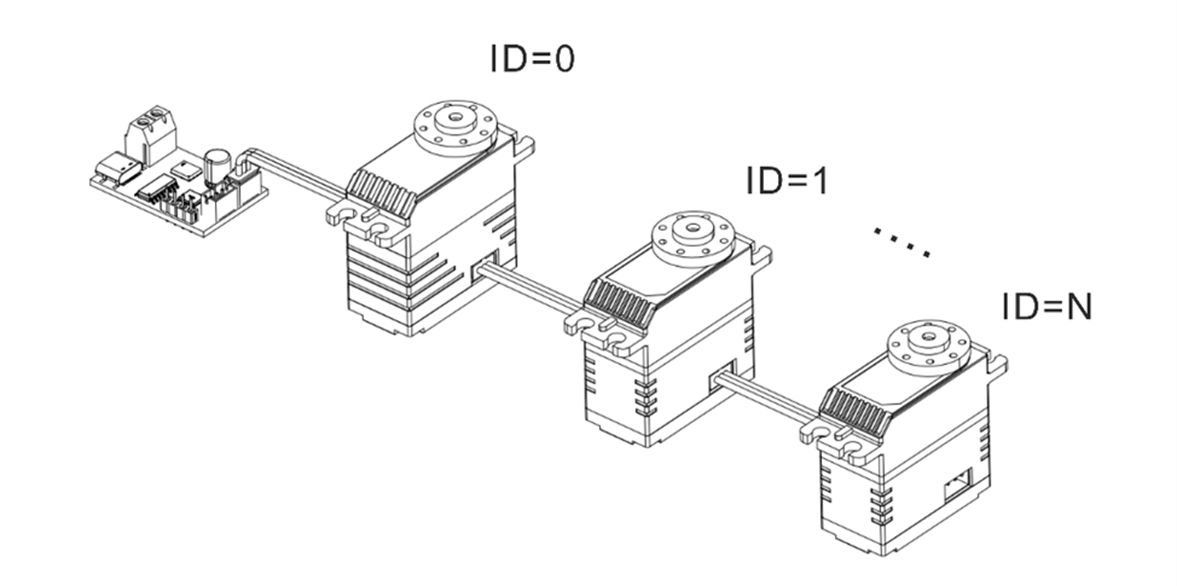
Daisy-chain
T-N 特性曲线

Parallel
5. Interfaces & Wiring


Daisy-chain

Parallel
5. Interfaces & Wiring


Daisy-chain

Parallel
5. Interfaces & Wiring


Daisy-chain

Parallel
5. Interfaces & Wiring


Daisy-chain

Parallel
5. Interfaces & Wiring


Daisy-chain

Parallel
5. Interfaces & Wiring


Daisy-chain

Parallel
6. Development Environment & SDK
Provides SDKs and example projects for mainstream control boards, programming languages, and robotics frameworks, enabling rapid validation, feature development, and system integration.
| 平台/环境/语言 | 兼容型号/内容 |
|---|---|
| Arduino | |
| ESP32 | |
| STM32 | |
| 树莓派 | |
| 编程语言 | |
| 操作系统 |
7. Protection Features
| 温度保护 |
|---|
|
| 堵转保护 |
|---|
|
| 功率保护 |
|---|
|
| 电压保护 |
|---|
|
| 电流保护 |
|---|
|
Warning
- 电压保护Trigger后,必须断电并重新上电,舵机才会Recovery工作。
- Stall/power/current protections prevent overload damage. Setting thresholds too high may make protection ineffective.
- 若频繁Trigger温度/电流保护,请降低负载或改善散热与供电。
Note
- The default threshold for temperature protection is 70°C.
- Default voltage protection range:
- 7.4V version: 6.0V - 8.4V
- 12V version: 9.0V - 12.6V
- 24V version: 20.0V - 25.2V
- 电流保护可与堵转/功率保护结合使用,当上位机未Trigger前两项逻辑时,电流保护作为硬件层级的最后保障。
8. Commands & Protocol
8.1 Control Commands
| Command Name | Command ID | Response Packet Type |
|---|---|---|
| Communication Check | 01 (0x01) | Fixed |
| Basic Single-turn Position Control | 08 (0x08) | Configurable |
| Advanced Single-turn Position Control (Time-based) | 11 (0x0b) | Configurable |
| Advanced Single-turn Position Control (Speed-based) | 12 (0x0c) | Configurable |
| Read Current Single-turn Position | 10 (0x0a) | Fixed |
| Basic Multi-turn Position Control | 13 (0x0d) | Configurable |
| Advanced Multi-turn Position Control (Time-based) | 14 (0x0e) | Configurable |
| Advanced Multi-turn Position Control (Speed-based) | 15 (0x0f) | Configurable |
| Read Current Multi-turn Position | 16 (0x10) | Fixed |
| Reset Turns | 17 (0x11) | Configurable |
| Damping Control | 09 (0x09) | Configurable |
| Stop Command | 24 (0x18) | Configurable |
| Sync Command | 25 (0x19) | None |
| Async Write | 18 (0x12) | None |
| Async Execute | 19 (0x13) | None |
| Data Read | 03 (0x03) | Fixed |
| Data Monitor | 22 (0x16) | Fixed |
| Set Zero | 23 (0x17) | Configurable |
| Custom Parameters | 04 (0x04) | Configurable |
8.2 Protocol Format
- Transmit Protocol Format
| Byte Index | 0~1 | 2 | 3 | 4~N+3 | N+4 |
|---|---|---|---|---|---|
| 内容 | Request Header 0x12 0x4c |
Command ID | Payload Length N | Payload | Checksum |
Example: Servo ID 2 rotates to 90° at maximum power in 500 ms.

- Response Protocol Format
| Byte Index | 0~1 | 2 | 3 | 4~N+3 | N+4 |
|---|---|---|---|---|---|
| 内容 | Response Header 0x05 0x1c |
Command ID | Payload Length N | Payload | Checksum |
Unpack: 0x86 0x03 is the current servo angle. After unpacking it is 902, which converts to 90.2 degrees.

Tip
- The product supports multiple control commands and command lengths may differ. To avoid control issues caused by packet loss, add at least a 10 ms interval after each command is sent. Example: Command 1 (sent) → delay 10 ms → Command 2 (sent) → delay 10 ms → Command 3
- By default, if the Servo receives a new control command while executing the current one, it will interrupt the current command and execute the new command with higher priority. The original command will not continue.
- Send a Ping command to the corresponding ID and determine whether the Servo is online based on the response.
9. Motion Control
9.1 Single-turn Position Control
支持按时间/速度两类控制,参数包含目标角度、运行功率、加减速等;并可通过单圈角度读取指令获取当前位置。
| 指令ID | 指令名称 | 参数 |
|---|---|---|
| 08 (0x08) | Basic Single-turn Position Control | 目标角度、运动时间、运行功率 |
| 11 (0x0B) | 高级单圈角度控制(基于时间) | 目标角度、运动时间、加速时间、减速时间、运行功率 |
| 12 (0x0C) | 高级单圈角度控制(基于速度) | 目标角度、运动速度、加速时间、减速时间、运行功率 |
| 10 (0x0A) | 单圈角度读取 | 当前角度 |
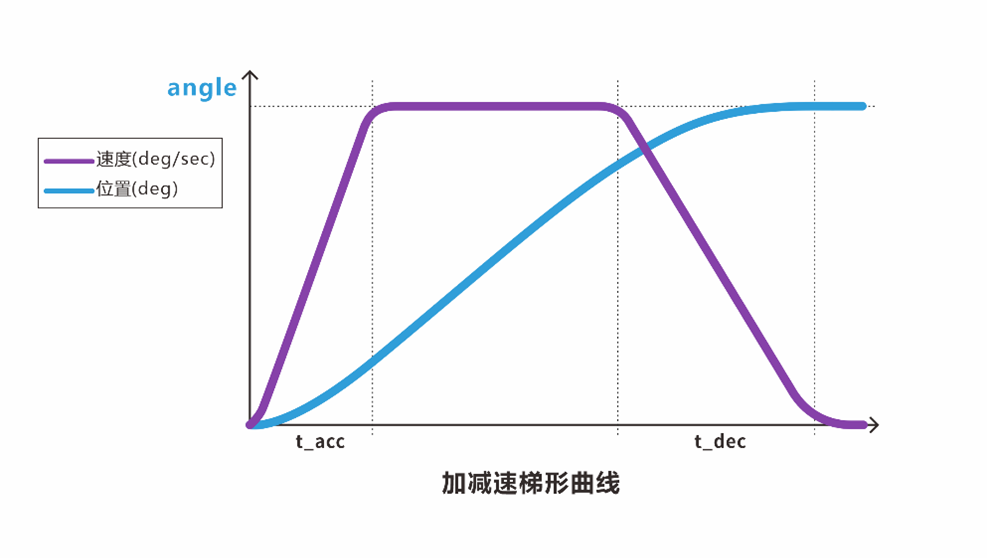
Trapezoidal Accel/Decel
Note
- Control range: in single-turn mode, the controllable range is ±180°.
- Control unit: degrees (°), minimum control resolution 0.1°.
9.2 Multi-turn Position Control
支持按时间/速度两类控制,参数包含目标角度、运行功率、加减速等;并可通过多圈角度读取指令获取当前位置。
| 指令ID | 指令名称 | 参数 |
|---|---|---|
| 13 (0x0D) | Basic Multi-turn Position Control | 目标角度、运动时间、运行功率 |
| 14 (0x0E) | 高级多圈角度控制(基于时间) | 目标角度、运动时间、加速时间、减速时间、运行功率 |
| 15 (0x0F) | 高级多圈角度控制(基于速度) | 目标角度、运动速度、加速时间、减速时间、运行功率 |
| 16 (0x10) | 多圈角度读取 | 当前角度 |
Trapezoidal Accel/Decel
Note
- Control range: in multi-turn mode, the control range is ±368,640° (±1,024 turns).
- Control unit: degrees (°), minimum control resolution 0.1°.
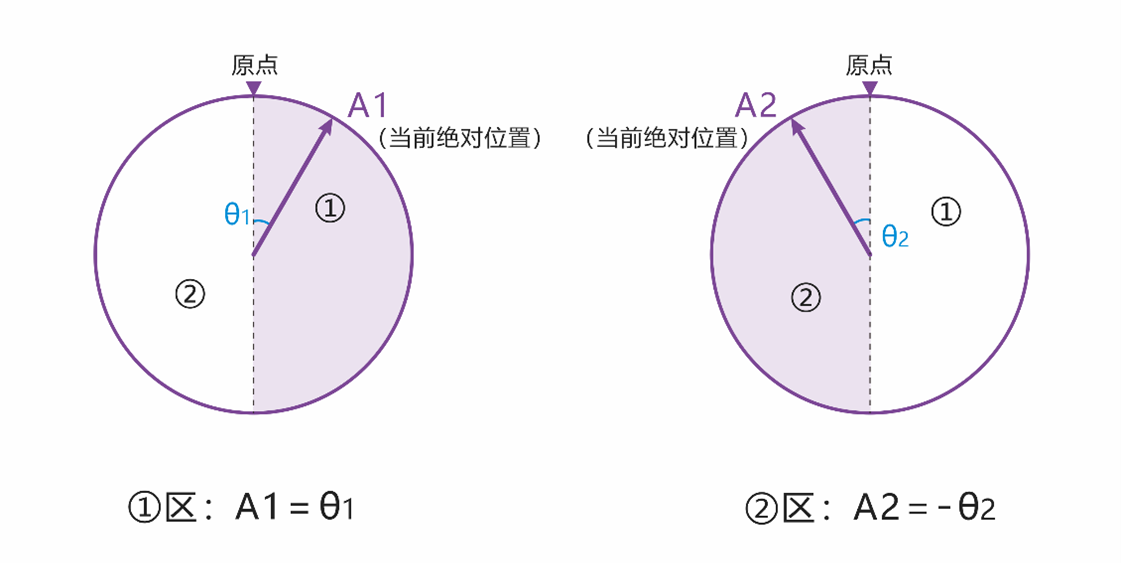
Absolute Angle Reset
- 在舵机处于释放锁力状态时,可通过上位机或指定指令来重设当前角度数据。
- 重设后,舵机会以当前绝对位置来重设角度,再次设定后的角度初始值将在 -180° 至 +180° 范围内。
示例:如图所示,A1 点当前角度为 6,880°,重设后的角度为 θ1。A2 点当前角度为 6,800°,重设后的角度为 -θ2。
Multi-turn Reset
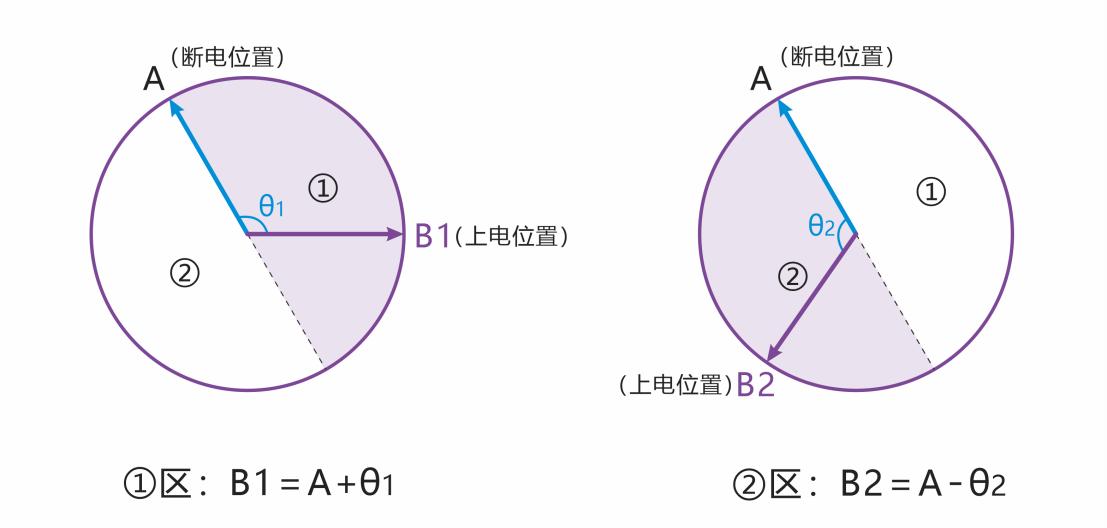
Power-off Position Memory
- 支持断电角度记忆功能。
- 断电后,若伺服舵机的角度未发生变化,则上电后读取的当前角度值保持不变。 例如:A 点为断电前的角度位置 6,800°,断电期间角度未改变,舵机仍停留在 A 点,则上电后读取的角度仍为 6,800°。
- 断电后,若由于外力作用导致舵机角度发生变化,则再次上电后读取到的角度值将落在记忆角度 ±180° 的范围内。 例如:如图所示,A 点为断电前的角度 6,800°。若断电期间舵机被外力转动,最终停在 B1 点,则上电后读取角度为 6,920°;若停在 B2 点,则读取角度为 6,680°。
Power-off Memory
9.3 Damping Mode
- 允许伺服舵机在外部力的作用下调整到不同的角度位置,同时保持一定的阻尼效果。
- 阻尼系数可自定义。
9.4 Stop Command
- 客户可以根据不同运动控制需要,选择合适的Stop Command类型,具体类型详见下表。
- Stop Command也可被用于伺服舵机在堵转保护下,Recovery正常工作状态使用。
- 当伺服舵机在失锁状态下,发送“Torque Hold”指令,可使其从当前位置重建锁力。
| Stop Command类型 | Behavior |
|---|---|
| Torque Release | The Servo stops immediately and releases holding torque. |
| Torque Hold | The Servo stops immediately and holds torque, or rebuilds holding torque if it was released. |
| Damping Hold | The Servo stops immediately and enters damping mode; the angle can be adjusted by external force. |
9.5 Sync Command
- 单条指令同时包含多个伺服舵机的控制指令,适用于多个舵机协同Action的场景。
- 每个伺服舵机通过唯一的 ID 与指令内容中的参数进行匹配,仅解析并响应与自身 ID 相关的控制信息。
- 所有伺服舵机接收完指令后,将同时开始执行各自的指令,实现同步Action效果。
9.6 Async Commands
- 异步指令由Async Write和Async Execute两部分组成。
- Async Write发送后,再发送需要执行的运动指令,使该指令暂存在对应 ID 伺服舵机的寄存器中,该运动指令不会立即执行,需通过Async Execute统一启动。
- 当Async Execute下达时,所有已暂存运动指令的伺服舵机将同时执行对应Action,实现多个伺服舵机的同步控制效果。
- 已暂存的运动指令,在未重新写入或未断电的情况下将持续保留,不会因其他指令的运行而被覆盖或清除。
- 异步指令被Trigger执行后,相关参数将被自动清除,不再保留。