HP6/RP6-U12H-M

RA8-U25H-M

HA8-U25H-M
点击下方按钮开始下载:
Note
Noted
Tip
Tips
Important
important
important
Warning
Warning
Caution
Caution
PiPER-Mate
📖 项目简介
PiPER-Mate 是一个机械臂遥操作控制项目,支持通过 PiPER Mate 机械臂 实时远程控制 Piper 机械臂。项目提供三种控制方式,适用于机器人研究、遥操作教学、AI训练数据采集等多种场景。
✨ 核心特性
- 🤖 多控制方式:支持 ROS2 HUMBLE、Lerobot 框架、Python SDK 三种控制模式
- ⚡ 高控制频率:支持最高 100Hz 的实时遥操作
- 🔄 关节自动映射:自动将 PiPER Mate 关节角度转换为 Piper 控制指令
- 🛡️ 安全保护:内置关节角度限制、力矩控制和异常检测机制
- 🎯 夹爪控制:支持可选的夹爪协同控制功能
🚀 快速开始
环境要求
| 项目 | 要求 |
|---|---|
| 操作系统 | Ubuntu 22.04 |
| ROS版本 | ROS2 Humble |
| 硬件设备 | PiPER Mate机械臂 + Piper 机械臂 |
| 驱动程序 | CH340 USB驱动 |
安装步骤
方式一:Python SDK(推荐新手)
# 1. 安装依赖
sudo apt update && sudo apt install can-utils ethtool
sudo pip install serial fashionstar-uart-sdk piper-sdk python-can scipy
# 2. 配置CAN接口
cd piper-mate
bash find_all_can_port.sh
bash can_activate.sh can0 1000000
# 3. 运行程序
sudo chmod 777 /dev/ttyUSB*
python3 ./Python_SDK/piper_pipermate.py
方式二:ROS2 HUMBLE
# 1. 安装ROS2依赖
cd ROS2_HUMBLE
colcon build
source install/setup.bash
# 2. 启动节点(需要两个终端)
# 终端1:启动PiPER Mate驱动
ros2 run piper-mate driver --ros-args -p port:=/dev/ttyUSB0 -p auto_enable:=false
# 终端2:启动Piper控制
bash can_activate.sh can0 1000000
ros2 run piper piper_single_ctrl --ros-args -p can_port:=can0 -p auto_enable:=true
方式三:Lerobot 框架
# 参考Lerobot/README.md配置说明
📂 项目结构
PiPER-Mate/
├── Python_SDK/ # Python SDK控制方式
│ ├── piper_pipermate.py # 主控制程序
│ └── README.md # 详细使用文档
├── ROS2_HUMBLE/ # ROS2控制方式
│ ├── src/piper/ # Piper驱动节点
│ ├── src/piper-mate/ # Piper_mate驱动节点
│ ├── src/piper_msgs/ # Piper消息定义
│ └── README.md # ROS2使用文档
├── Lerobot/ # Lerobot框架控制方式
│ ├── lerobot_robot_piper/ # Piper机器人配置
│ ├── lerobot_teleoperator_pipermate/ # 遥操作器
│ └── piper-star_en.md # Lerobot使用文档(英文)
│ └── piper-star.md # Lerobot使用文档
│ └── README.md # 使用步骤
├── can_activate.sh # CAN接口激活(根目录)
├── can_config.sh # CAN接口配置
└── README.md # 本文档
🎯 控制方式对比
| 特性 | Python SDK | ROS2 HUMBLE | Lerobot |
|---|---|---|---|
| 难度 | ⭐ 简单 | ⭐⭐⭐ 中等 | ⭐⭐⭐⭐⭐ 复杂 |
| 实时性 | ⭐⭐⭐⭐⭐ | ⭐⭐⭐ | ⭐⭐⭐ |
| 扩展性 | ⭐⭐ | ⭐⭐⭐⭐⭐ | ⭐⭐⭐⭐ |
| 适用场景 | 快速测试、教学 | 机器人系统集成 | AI训练、研究 |
🔧 硬件连接
连接拓扑
┌─────────────────┐ USB ┌─────────────────┐
│ │◄────────────────────►│ │
│ PiPER Mate │ │ 计算机 │
│ 机械臂 │ │ (Ubuntu 22.04) │
└─────────────────┘ └────────┬────────┘
│
USB
│
┌─────────────────┐ CAN ┌────────┴────────┐
│ │◄────────────────────►│ │
│ Piper │ │ CAN转USB适配器 │
│ 机械臂 │ │ │
└─────────────────┘ └─────────────────┘
📊 关节映射
系统自动将 PiPER Mate 的 6 个关节映射到 Piper 机械臂:
| 关节 | PiPER Mate 角度 | Piper 弧度 | 方向 |
|---|---|---|---|
| Joint1 | -150° ~ 150° | -2.62 ~ 2.62 rad | 反向 |
| Joint2 | 0° ~ 180° | 0 ~ 3.14 rad | 正向 |
| Joint3 | -170° ~ 0° | -2.97 ~ 0 rad | 正向 |
| Joint4 | -100° ~ 100° | -1.75 ~ 1.75 rad | 反向 |
| Joint5 | -70° ~ 70° | -1.22 ~ 1.22 rad | 正向 |
| Joint6 | -120° ~ 120° | -2.09 ~ 2.09 rad | 反向 |
⚠️ 安全注意事项
- 操作前检查:确保机械臂周围无障碍物,工作空间安全
- 急停控制:程序运行时按
Ctrl+C可立即停止 - 关节限制:系统已自动设置安全角度限制,避免越界运动
- 电源管理:确保机械臂供电稳定,避免电压波动
🐛 故障排除
常见问题
Q1: 找不到 /dev/ttyUSB0 设备?
# 检查USB设备
ls -l /dev/ttyUSB*
# 检查CH340驱动
lsusb | grep CH340
# 如果没有安装驱动,请从官网下载安装
Q2: CAN 接口无法激活?
# 查找CAN端口
bash find_all_can_port.sh
# 手动激活CAN接口
sudo ip link set can0 type can bitrate 1000000
sudo ip link set up can0
# 检查CAN接口状态
ip link show can0
Q3: 机械臂连接失败?
- 检查USB线连接是否松动
- 确认机械臂电源已开启
- 检查驱动板开关位置(应拨向电源接口一侧)
- 尝试更换USB端口
Q4: USB连接断开时程序不终止?
程序已添加异常处理,当PiPER Mate USB断开时会自动终止并显示错误信息:
❌ 致命错误:PiPER Mate USB连接断开!
📖 详细文档
选择你需要的控制方式查看详细文档:
- 📘 Python SDK 详细文档 - 推荐!最简单易用
- 📗 ROS2 HUMBLE 详细文档 - 适用于机器人系统集成
- 📙 Lerobot 详细文档 - 适用于AI训练和研究
📄 许可证
本项目基于 MIT License 开源。
👥 作者与致谢
- 项目维护者:Welt-liu
- 感谢:PiPER Mate 和 Piper 团队的硬件支持
🔗 相关链接
-
项目维护者:

-
感谢:PiPER Mate 和 Piper 团队的硬件支持
3. 规格参数
3.1. 基础参数
| 参数项目 | 技术规格 |
|---|---|
| 工作电压 | 9.0~12.6 V |
| 马达类型 | 空心杯马达 |
| 位置传感器 | 12-bit 非接触式绝对值编码器 |
| 分辨率 | 4096 阶 / 360°(0.088°) |
| 有效角度 | ±180°(单圈)/±368,640°(多圈) |
| 处理器 | 32-bit MCU |
| 通信类型 | UART / TTL 半双工 |
| 波特率 | 9,600 bps ~ 1 Mbps |
| ID 范围 | 0 ~ 254 |
| 减速比 | 273:1 |
| 齿轮材料 | 全金属不锈钢组合 |
| 输出轴规格 | 不锈钢 / Ø6 mm / 25T |
| 外壳材料 | 铝合金中段 / 上下壳工程塑胶 |
| 接口类型 | PH2.0 – 3Pin |
| 尺寸重量 | 40 × 20 × 40 mm / 73 g |
| 工作温度 | -10~60 ℃ |
| 工作模式 | 单圈角度 | 多圈角度 | 阻尼模式 |
3.2. 特性参数(@12V)
| 参数项目 | 规格内容 |
|---|---|
| 最大静态扭矩(堵转) | 4.41 N·m(45 kg·cm) |
| 最大动态扭矩 | 1.67 N·m(17 kg·cm) |
| 额定扭矩 | 0.54 N·m(5.5 kg·cm) |
| 额定转速 | 64 rpm(0.156 s / 60°) |
| 空载转速 | 90 rpm(0.110 s / 60°) |
| 峰值电流 | 6 A |
| 空载电流 | <300 mA |
| 静态电流 | <30 mA |
| 轴向 | 20 N |
| 径向 | 40 N |
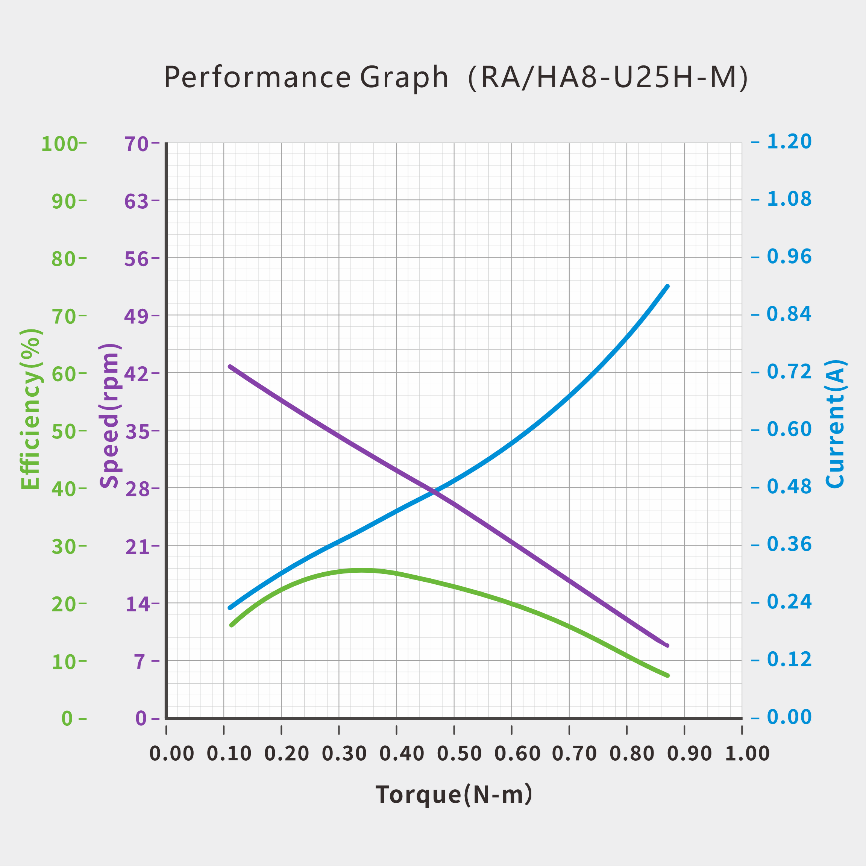
T-N 特性曲线
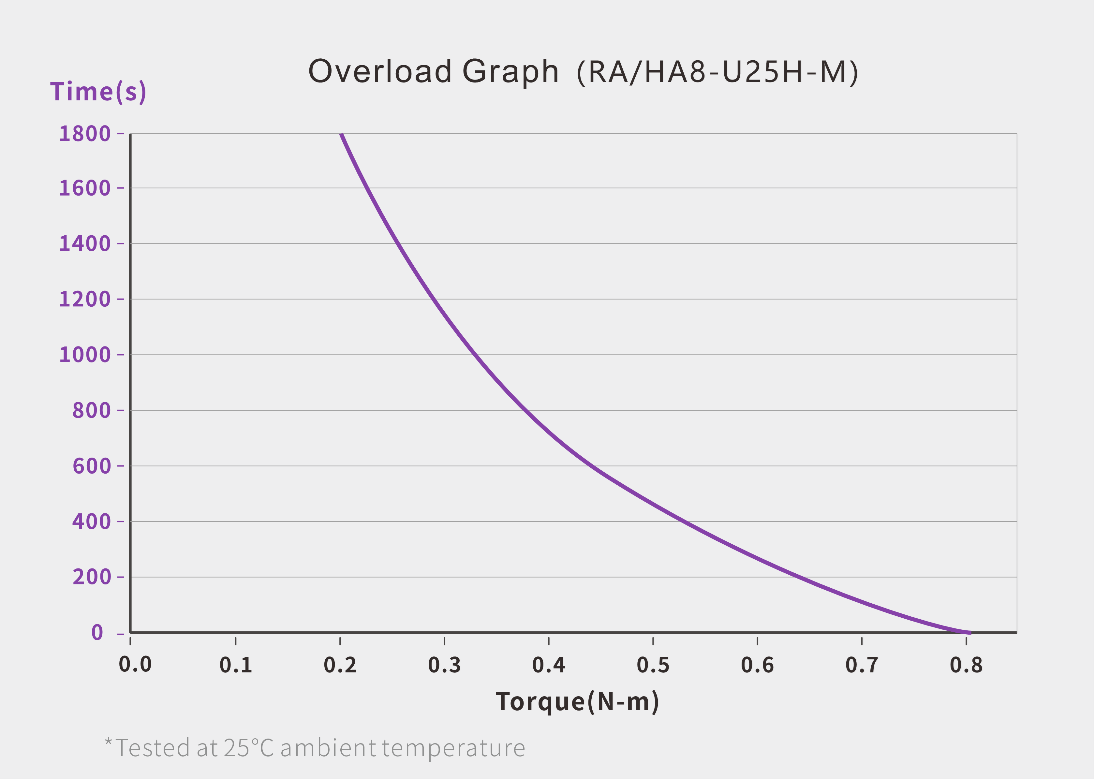
机械过载曲线